Over the last few weeks, a lot of progress has been made!
The PIE 4.8 CW & CCW halves have been assembled and tested.
Testing has been done with both running on separate motors at both similar and different speeds, with the conclusion that the halves need to be synchronized to be effective.
A test cart has been constructed with smooth runners to see if the PIE and its wheels were pushing against the wheels’ friction in any way which would indicate a stick-slip drive. Results show that the PIE 4.8 would cleanly self-propel off of the cart under it (which moves as easily as the PIE) without either pushing the cart back or pulling it along. There are those who say that “it proves nothing”, to which I say “OK… I really don’t care! I am not trying to “prove” it works”.
I have a video of that test here:
A new frame has now been constructed for the dual PIE 4.8 and the assembly is almost ready for full-on road testing.
PIE 4.8 frame being assembled
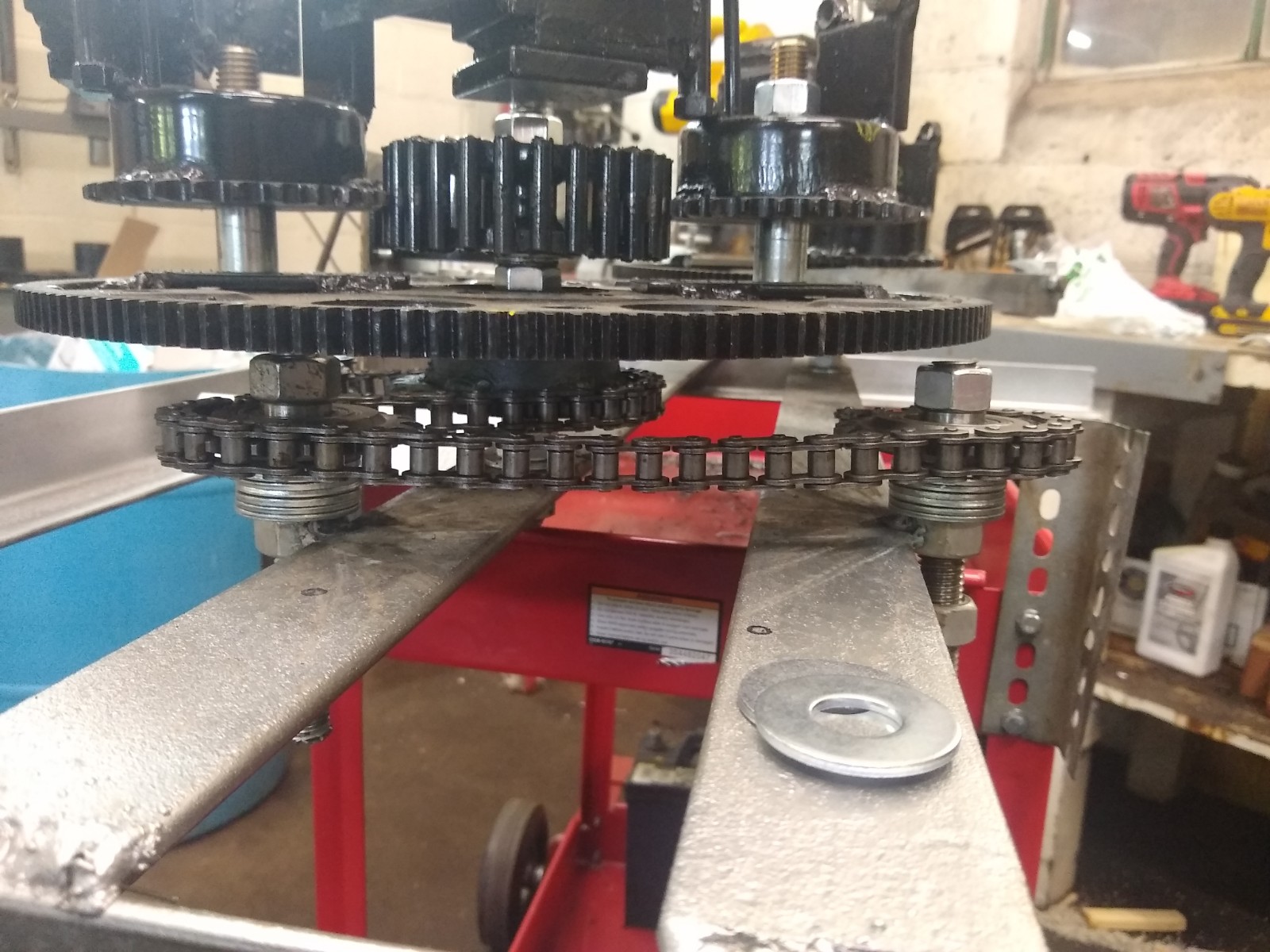
A chain drive was devised to rotate the wheels in opposite directions from a single motor, and the SDC only needs to be connected to one wheel for operation. The frame is pretty heavy being made from 2” X 2” X 3/16” steel angle, but it should not “flex” at all during operation!
PIE 4.8 Chain
Here is a video of the PIE 4.8 being tested on its new frame:
I have also been asked to do a presentation for the APEC conference. I am putting a Power Point (PP) presentation together at this time which I will narrate live rather than pre-recording. There will be graphics (some of which were supplied by Mr. Tokio Muramatsu) and a short “timeline” video… What else is yet to be determined.
Well now, it seems that with the openness of the experimentation, building, fabricating, and functional videos that the “it doesn’t work” folks have become “it only works because of” folks.
The better we get this working, and the more verified data there is, the more people keep coming up with reasons they think we get propulsion. Primarily this presumptive opinion input has revolved around friction. The common theory is that “contact” with virtually anything is the friction causing propulsion. I cannot say that anything is impossible, but short of tossing this thing out into space it will be nearly impossible to “disprove” that theory! Here is my position on this… “Who freaking cares?!?!?!” It just works, so let us expand on this and put it to use for the betterment of EVERYONE!
I get it that the super smart technical theorists believe that anything that isn’t incredibly complex simply cannot work. Sorry people, but that is just another false theory which has been mistaken as fact.
Mine is NOT the only system that works, mine is not the only tech that needs to be openly replicated. If the replications are done with an expectation of failure, it will most likely fail. If they are done with an open & optimistic attitude with an expectation of recording valuable data, extraordinary things are possible!
PIE 4.8 First Test Setup
I have recently published the video on YouTube and BitChute of the first round of Dual-Wheeled testing with fully independent asynchronous control of each wheel (CW & CCW rotating). More testing videos will be published, and a comprehensive report will be published when these tests are complete. That video is visible below.
I have been actively experimenting and building “stuff” for many years. Some of this “stuff” was really never meant to see the light of day or at least never to be “reviewed” by “academia”, it was done for the sheer joy of creating something new and unique. Now that one of these creations has progressed to the point where it becomes something profoundly useful, academia is pushing back harder than ever… Even with a functional prototype right in front of them, the PhD scientists are quick to expound their firm belief stating loudly “that’s not possible” and accusing anyone involved in any way of being a “charlatan”, a “fake”, or a “scammer”.
Just like the idea of “perpetual motion” or “zero-point energy”, “inertial propulsion” is seen as a direct threat to everything they have been taught and what they have been taught to stand for. Anyone even open to the idea is immediately labeled as a “fraud” and is no longer welcome anywhere near the circles of the “scientifically advanced” or “real” scientists (as they consider themselves).
It has even been publicly stated that “there is no longer a place for the ‘garage inventor’ because there is nothing more they can contribute to science”… HOGWASH! Science has become a cult of “elitists” who are so self-absorbed that all others are too far beneath them to be of any value as human beings…
I have (unfortunately) come into direct contact with these “elitist PhD’s” and have simply learned make peace with this bullshit. Now as people around me are starting to experience the ostracism there seem to be a couple of choices presented. One choice is to “roll over” and “take it up the a$$” by simply shutting up and going away. Another is to “avoid contact” with the elitists and quietly keep working. The third is to “stand and fight” against the system and the elitists running it.
No matter your personal decision, my advice (for what its worth) is to “stay true to what you believe in” BUT always “pick your fights wisely”! That is it… You may choose to avoid conflict and stay “safe”, but if you do choose to “stand-up” to the elite authority, do so wisely and do not expect to unilaterally “win”! Accept the small victories with graciousness, and consider the failures as “learning experiences” the same way we do in the lab or the shop!
Sorry to get so serious… Now I need to get back to work, and do what I do best building stuff… Thanks for reading this!
–The PIE 4.8 is ready to test with two counter rotating wheels. The two wheels are fully independent with their own identical speed controllers and motors. They are fastened together on a 2X4 frame, and initial testing will be on wheels followed by on-road testing. The photo has the assembly sitting on a work cart. That cart is not stable enough to run the PIE on, but it is enough to load/unload it from its transportation, and carry it between test stands.
PIE 4.8 CW & CCW Rotating Wheels Ready for Testing TogetherPIE 4.8 Dual Assembly
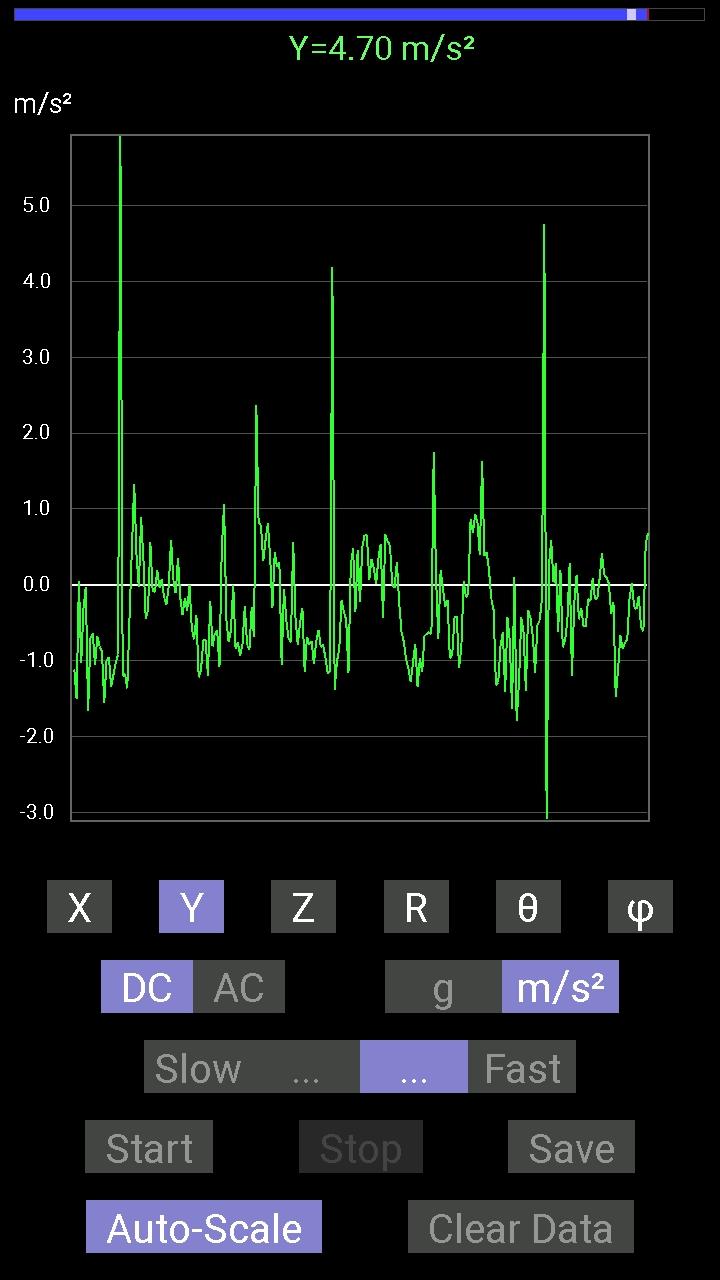
The PIE 4.8 CCW wheel is pretty well set. I have attempted to get some force tests done with a force meter, the output readings were very unstable at best. I was however able to get some slightly better readings with an accelerometer.
The photos are screenshots from an accelerometer app on an android phone. The waveform or trace is below the “0” when pulling forward. It is obvious that there is a more stable pull during each pulse forward, and disorganized spikes in the reversion direction. Keep in mind that it will show a small reverse pull between forward pulses just because the chassis slows slightly between propulsive pulses.
On Saturday 5/1/2021 I had the honor of being asked (at the very last minute) to speak about the PIE systems on the APEC conference Zoom meeting. My part was near the end but just before open discussion at 4:51:28 and even though I did not have anything prepared it was still a lot of fun. APEC is Advanced Propulsion Engineering Conference and it is hosted by Tim Ventura of American Antigravity (https://www.americanantigravity.com). The full video of that conference is here:
During the conference we talked about the PIE systems, discussed theory, and talked about the near-future testing. We also discussed a phenomena that has been showing up in PIE experiments since the first on-road tests of the PIE 1.0. The phenomenon is that of increasing thrust when the entire unit is in motion. The faster the test vehicle moved the more forward thrust was experienced with each pulse. This has also been experienced and proven in the lab, so it has moved from a possibility into a fully testable repeating phenomenon. For lack of any better analogous terminology I started calling this the “Inertial Doppler Effect”. As a friend and colleague was maintaining that he thought the PIEs are still some form of “stick-slip” drive which depend on friction to operate (fully disproven in the lab) and it occurred to me that maybe he is wrong and right at the same time.
This is my current understanding of this phenomenon. I know that my “loose definition” of Doppler is not 100% correct when comparing a mechanical system to an EM wave form. This is a copy and paste of my reply to the idea of the PIE being a stick-slip drive:
My analogy of inertial Doppler is a “still forming” theorem, bit it currently a spacial/mass/inertial interaction which is proving itself in reality. Here are some cold, hard, facts… Doppler effect exists because the “center of mass” of the energy wave is moving and the energy is emanating from that “center of mass” making the wave have more “force” in the forward moving direction (Overly Simplified). Sooooo… The PIE (or I venture to say “any”) inertial drive will exhibit the Doppler effect, and if that is so (it is IMO) then all inertial drives ABSOLUTELY MUST have more mass in the overall structure than the masses being displaced (moved, oscillated, etc. also) in order to have directed thrust (linear motion). If the mass of the structure were less there would only be massive vibration (oscillation) – example: if a 2 moving mass (weights) structure weighed 5kg and the masses weighed 2.5kg each there would be a net linear propulsion of little more than zero even if the propulsive force was 2X higher than reversion force, but if the structure weighed 10kg there would be more mass “in motion” than there is “reverting”… So, ideally the mass of the structure should be 1 to 2X of the reversion force!
If I didn’t ramble too incoherently, and you are following my train of thought above, this means that ANY inertial drive which succumbs to this theory is a “stick-slip” drive but it is the inertia of the structure’s mass that it’s “sticking” to (pushing against). It also explains the Doppler effect because if it is “pushing” against inertia itself, that inertia is stronger as the structure moves!
I may have sprained a brain cell or two trying to put this theorem into words!!!
The PIE counterclockwise wheel (CCW) is nearly finished and will be tested very soon. I made a significant change to the “outer stop” which works so well to warrant changing up the model number to PIE 4.8 and I am installing them on all of the planet gears for the PIE 4.8.
improved outer stops and “Halo” mounts after paintingHalo mount and improved outer stop as seen during setup
I have also improved the mounting (resembling a halo) for the swinging weight. This improvement also allows for the addition of strengthener braces if it is found to be necessary.
Halo Bracket for Swinging Weight
The new stops allow for actual adjustment of the stops. This will allow me to make small changes to stop position and find out if there is a particular “sweet spot” for the outer stop.
Improved outer stop and halo mount working well during SDC setup
The CCW wheel is constructed to run on its own with its own separate motor and speed controller (as seen above). This is necessary to run the full gamut of necessary tests regarding phasing and RPMs. Once these tests are complete there will be better data regarding proper synchronization and whether the two opposing wheels should even be synched at all.
I have posted several videos on my YouTube and BitChute channels showing the building of the CCW and the new PIE 4.8 stops. Here (below) is the new PIE 4.8 CCW running its bench test with the SDC installed.
Here (below) is the first bench test run of the CCW before the SDC was installed.
Here (below) is the PIE 4.8 CCW set on some pipe rollers just to check for backward force (reversion) vs. forward force (thrust).
It has been a while since my last post, or video so here is an update:
The PIE 4.7 second half (CCW wheel) is progressing, although somewhat slower than I would prefer as life’s circumstances have presented certain obstacles to its advancement. The first “dead blow” weight for it is ready to install, and another is in process.
I always said it is not a good idea to have more than one project going at a time, yet that is exactly what I am doing…
After communicating at length with other builders, I have split my time between the PIE 4.7 and a new design, the “PIE X”. It has some radically different internal components and will look a bit different but it is still what I would call a Pulsed Inertial Engine, so right now it is known as the “PIE X”.
This design has originated from other people so I will need their permission to “open source” any of that information! I require their permission to share or publish the information leading up to the PIE X without the consent of those who have been kind enough to share the basic design information with me!
If the PIE X is as feasible as predicted and becomes something worth pursuing more information may be provided (with permission), and if it falls short, I will provide thoughts regarding that failure (still, with permission only).
Note: The PIE X is quite a bit more expensive and much more complex to build and fabricate the components for, so it may not be something the casual hobbyist would feel comfortable with, at least not until there is a working prototype to prove the principals.
Those who know me and those who have followed along with my PIE/PIETECH projects know that I do not randomly spout “theory”. I only present factual information so until I have an experimental prototype, I would not request permission to elaborate any technical information. I only mention the PIE X as an ongoing project because it does slow the PIE 4.7 project and has pushed back the timetable to begin full testing. I am hoping to be performing “on road” testing of the PIE 4.7 by early June which gives me about 8 weeks.
I hope to be posting photos and videos VERY soon, so right now I need to go get busy, I have a PIE 4.7 to finish building and a PIE X to get underway!
I am now actively building more weights and components for the counter rotating wheel assembly. As we have seen before, the PIE design works better with two wheels but this is the first one that has “self-propelled) with just one wheel. I think it will be very interesting to see it work with a second wheel, especially a counter rotating one.
If I do decide that I do not want it to counter rotate, the weights can be modified by just grinding the welds for the ramp brackets that I welded to the side of each one. The pivots are being made to work with the stops in either direction. The other pieces that would need changing are really just the actuators for the switches, so it would not be a super big deal.
It has been a little while since the first half was built, so I did have to go back and look to make sure the new weights match the original ones in both size and weight. Eight 2X2X3/8″ steel squares, two 1-1/2X3X1/16″ rectangles, a block to hold the pivot bushing and the bushing itself. Once the basic box is made, the BB’s are added to complete the weight measurement and make it a dead blow. I thought they were 2 kg each, but I actually had to weigh one to be absolutely certain! Once the BB’s are added, the top is welded on, and it will need a coat of paint.
The wheel is already constructed, as is the sun gear, so some of the most time-consuming work is already done.
I will update the blog here, as it all progresses.
It has been a while since my last update. I guess I kind of went down a bit of a rabbit hole looking for answers to the reversion issues that virtually all inertial drives have. The answers I found are useful, and everything learned has value!
My search took me through the world of compound levers, offset drives and finally to the Tolchin/Shipov drive. The T/S drive taught me the most as it uses some of the same principals necessary in virtually ALL inertial drives, which is adding the 4th “D” (Dimension) to a gyroscopic arrangement.
4D Gyroscopes: Everyone (basically) learned about 3D in grade school. Height, depth and width or in machine shop geometric algebra, X, Y and Z axis or dimensions. The 4th D is T, or time. Time in a spinning gyroscope is measured in RPM, or revolutions per minute. Adding the 4th “dimension” to a gyro is done by rapidly and purposefully changing the RPM faster AND slower, generally within a single revolution.
If you were to view a conventional toy-type gyroscope, you will notice a frame surrounding the flywheel and a smooth-rimmed flywheel in the center. Now, use a marker (pencil or crayon is fine) and put one dot on the rim of the flywheel. That is now our reference point. Place the gyroscope so you can see the entire rim of the frame and the rim of the flywheel. Place a mark on the frame at the top and the bottom as you are viewing it (right and left work too) and then using your finger turn the flywheel rapidly from one mark to the next, then slowly from that mark back to the beginning. That is the 4th D!!!
Imagine spinning the flywheel at 1000 RPM but installing a mechanism that will slow it to 800 RPM for one-half of each revolution, returning it to its original velocity for the other half, and you have a 4D gyroscope!
Now replace the dot on the flywheel with a small weight, and spin it fast then slow then fast then slow with every revolution one-half of it is moving fast and one-half moving slower. It might not be exactly what you desire, but there WILL be inertial propulsion derived from that device!
It is not about shuttling weights around; it is all about changing the “time base” by rapidly changing speeds during EVERY revolution! Shuttling weights can be part of that and quite often they are, unfortunately many people believe that the weight shuttling causes propulsion, when in fact it is only a component of the gyroscope that can be time-manipulated into performing propulsive work. This can be accomplished mechanically or electrically, and although those two systems may appear fundamentally different, they are like the difference between a diesel and a gas engine, they may be “fed” fuel differently and the ignition of that fuel is done differently they are still a piston & crankshaft engine (there are also rotary and turbine but I’m not going there right now).
So, keeping in mind that there are different ways of accomplishing the same basic task, I am back to the PIE 4.7 with a renewed outlook and it is definitely time to “Git ‘Er Done”!
As the PIE project continues, I am not blind to reality. There are still many shortcomings to be overcome, forces within the PIE assembly which fight themselves and therefore fight against the very purpose of the PIE. “Reversion” is “anti-propulsion” and it is the bane of all inertial propulsion systems, a primary force to be circumvented as it cannot be eliminated. In the quest for circumvention there is a relatively simple sounding answer known as “redirection”. There is a type of device which has purported to have redirected reversion with good efficiency invented by a Russian named Tolchin and redesigned by another named Shipov. Because this Tolchin/Shipov (T/S) design effectively used redirection within a narrow band of geometric proportions, and because the mechanicals of the T/S drive are less complex than that of the PIE, I have allocated a bit of time and resource to verify T/S drive operation. Assuming the device is verified, a small T/S could be used as an anti-reversion device with the PIE and with other strong impulse drives as well.
Tolchin vs. Shipov: The Tolchin drive was originally fully mechanical with a spring motor and mechanical governors and brakes to build forward momentum and then partially nullify reversion. Once Shipov came into the picture the mechanical controls were replaced with electrical controls. I believe either would be effective, but electrical is easier to adjust and modify so that is the route my experimental work is following at this time.
Tolchin Drive
Shipov Drive
Noteworthy Difference: There is one other noteworthy difference! The Tolchin drive appears to have lacked the precision of the Shipov drive. Watching the videos of the Tolchin vs. the Shipov, Tolchin used one moveable mechanism inside another to lessen the reversion. The inside mechanism moved forward and back “pulling” the main trolly with what appear to be rubber bands. The inner mechanism may also be angled downward slightly to use gravity as an integral part of the cycle. Shipov eliminated these considerations with precise braking control of the rotating assembly.
The Tolchin/Shipov drive cycle explained:
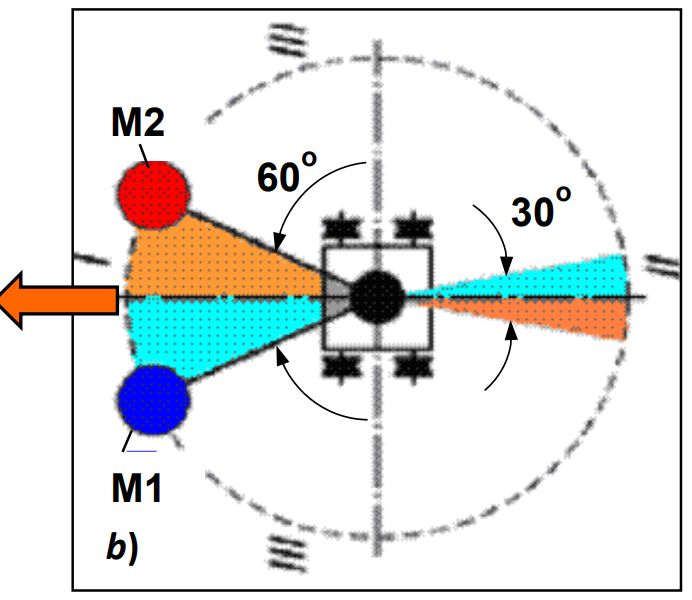
The T/S drive has 2 halves and they are identical mirror images of each other so I will only focus on 1/2 of the drive. I will be using clock positions of the weights for clarity. The rotation in this explanation will be clockwise to follow the numbers and 12 o’clock is straight forward.
1: At 12 the weight is moving at base speed.
2: At 1:30 (60 degrees) the weight is accelerated to approximately 2X to 3X the base speed (power stroke).
3: At 5:30 (30 degrees from center measured at the bottom) the weight returns to base speed.
4: The weight continues at base speed on around to 12 and starts over.
Since the acceleration force is designed to occur within a 90-degree arc (1/4 revolution), the forward thrust needs to be more than the reverse thrust used in returning the weights to the front. This is simple but stopping the acceleration (accelerated speed) at the exact right moment is critical if the T/S drive is to function!
Shipov Drive Cycle
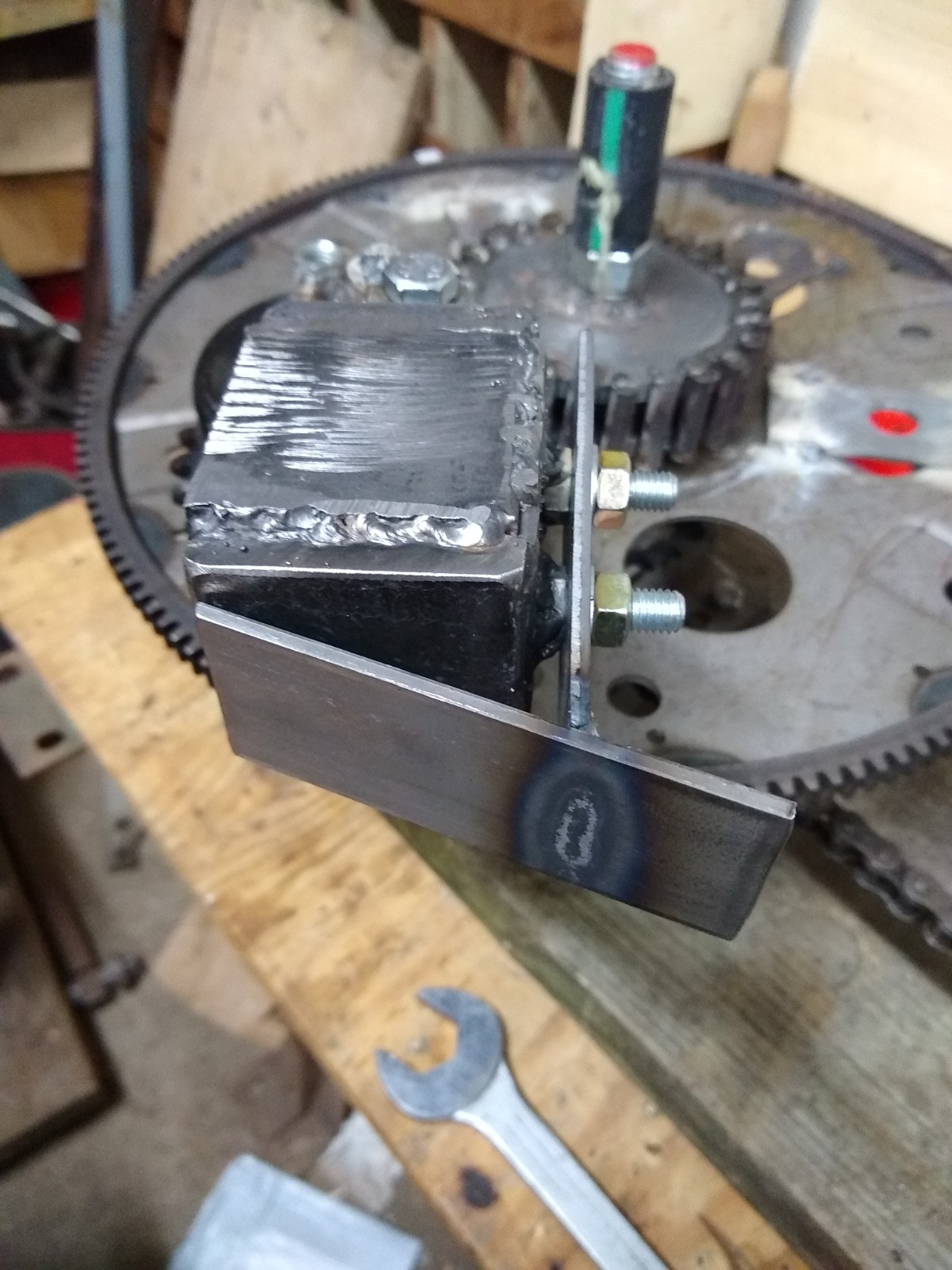
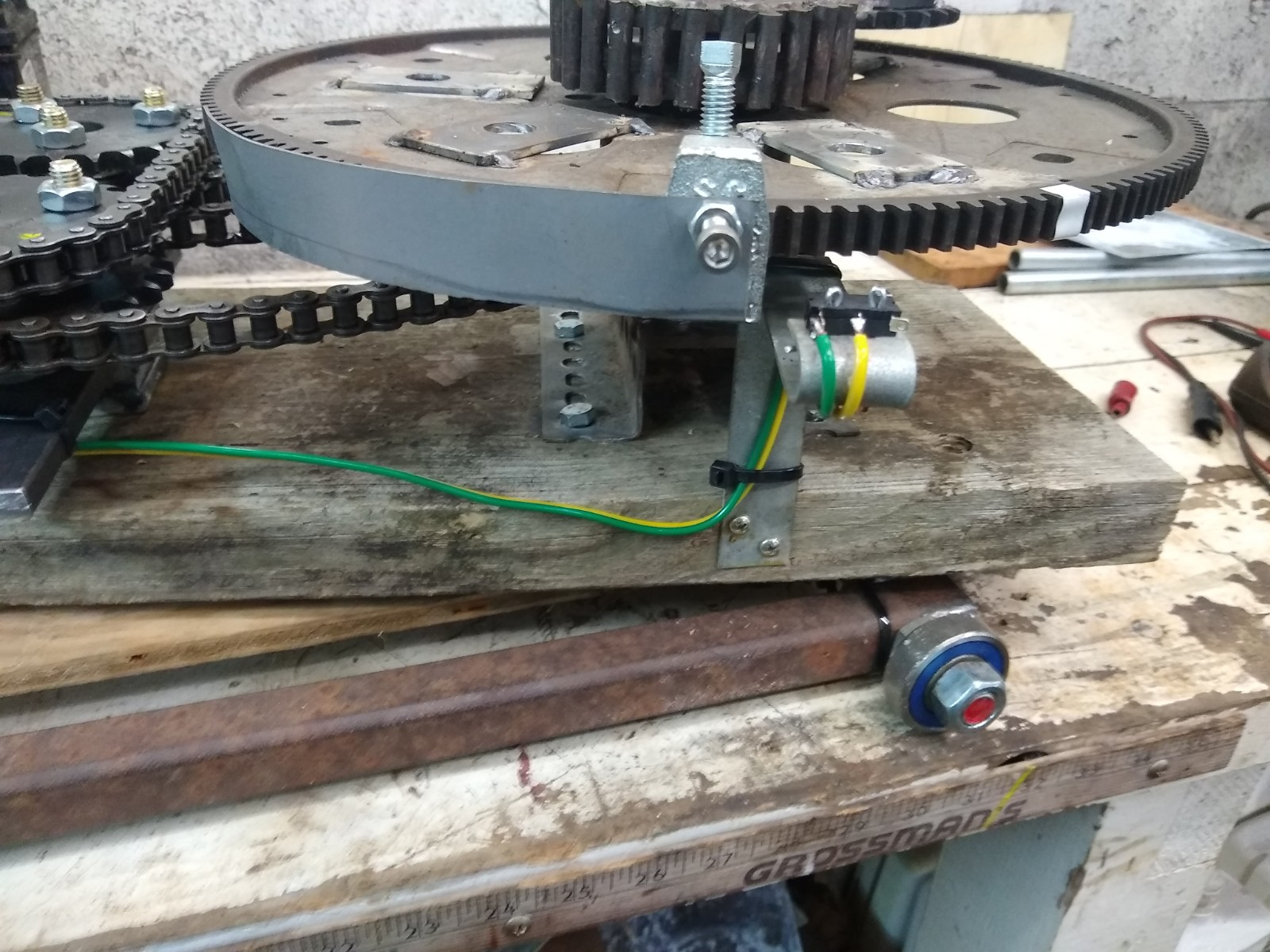
Current: Right now, the gearing is put together and I am currently powering it with an obsolete cordless drill mechanism. Speed control is accomplished with the same controller being used on the PIE 4.7, including the SDC control.
Current T/S Type Drive Experiment
Problem: The problem with my replica is the weight’s return to base speed is not instant, and because the rotation is still moving too fast (and overshoots the desired slow-down position) the centripetal force pulls in the wrong direction. A brake is needed to quickly (instantly if possible) slow the rotation speed back to base speed. I believe this might be accomplished with a “motor brake” working similarly to a modern cordless drill which stops without coasting when the trigger is released. Another thought is that my weights are too heavy for the older model drill motor to effectively decelerate quickly, and they may need to be replaced with lighter weights.
Gyro, Centrifugal, Centripetal? Shipov called this a “4D gyroscope” where the 4th dimension is time (rotation speed), but it could also be called a “centripetal drive” since thrust is derived by accelerating the weights in an arc toward the rear, and then the centripetal energy is absorbed by reducing speed at the moment the direction is perpendicular to desired motion. Since the mirrored half is doing the same thing in the opposite direction, sideways force is cancelled at both the acceleration point and deceleration point.
***Note #1: This post was created before P.15 so the testing spoken of has been completed already. Read PIETECH P.15 for explanation.***
As I approach and prepare for the next set of propulsion tests for the PIE 4.7, want to note the most recent successful design changes made which do increase power output in the early bench tests performed so far. It should be noted that none of these changes require any input power increases.
***Note #2: I also have had another idea, one that seems so preposterous that I am consulting with a few trusted individuals before revealing it.***
The first three of these four are self-explanatory but we shall touch on them very quickly.
It is a definite power output increaser to:
1… hold the weight in center longer (via guides).
Weight With Guide Attached
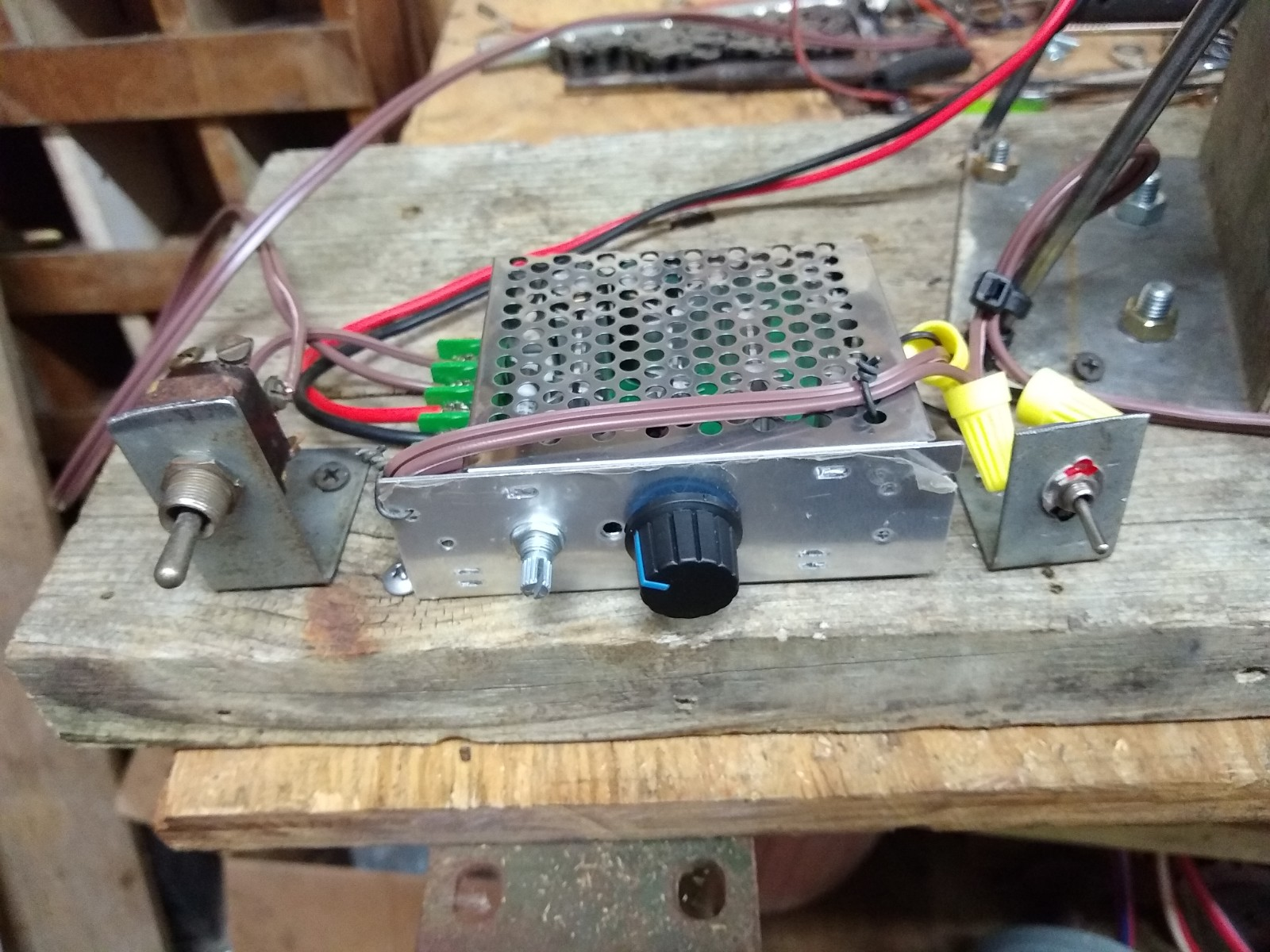
2… to be able to adjust speeds on the fly (via speed controller and SDC gain control).
SDC Controller
3… use dead blow weights (stronger & longer pulses without increasing input energy).
Building a Dead Blow Weight
4… use the SDC (counters loading slow-down and increases pulse strength).
SCD Actuator and Micro-Switch
Number 4, the SDC (Speed Differential Control) is a real game-changer, so that is where the focus needs to be for now. Some of the important details & technical notations regarding this are as follows:
1st: The output goes down dramatically if speed is reduced during the “power stroke”. This was discovered when the original belt would slip at times. It stood to reason that if speed decrease was detrimental, an increase could be very beneficial. Mechanical experimentation was performed very successfully by my friend and colleague Tokio using offset (eccentric) gear drives. When he added them to a PIE design (PIE 3.* series) great power was generated, and many components were destroyed by internal forces. Electrically changing speeds is quick and efficient!
2nd: Higher speeds are known to increase power output, but reducing the weight in order to achieve the high speeds was counterproductive. The SDC can momentarily increase the speed higher than necessary to maintain base RPM, simulating a higher speed without adding damaging high loads to the mechanism or increasing input power.
3rd: Adding speed only when required adds to the outward swinging motion of the weight and reducing that speed “could” increase the impact on the outer stop to increase power.
4th: This may me a stretch of my imagination… I believe that the combination of the guide and SDC acts upon the PIE similar to the “Inner Planet Trap” did in the Roy Thornson design. I have to think that instead of speeding up the RPM at the correct moment, Roy was “slowing down” the RPM at the beginning of the power stroke and allowing the RPM to rise in mid-power stroke.
5th: Keeping the electric motor speed low is important as it reduces the overall inertial flywheel effect, allowing faster RPM changes to the PIE’s main wheel (flexplate/flywheel).
Something that can be kept in mind for future experiments would be the utilization of a CNC (think Arduino, maybe) controlled stepper motor and servo system, perhaps with hall effect sensors for feedback, which would virtually eliminate all of the guides, micro switches, gears, and chains. Even the main wheel could just be a straight arm attached to a stepper motor.
Those innovations (if ever used at all) are definitely a long way off in the future, and for now we need to learn to walk before we can learn to run.