The PIE 7 is coming along.
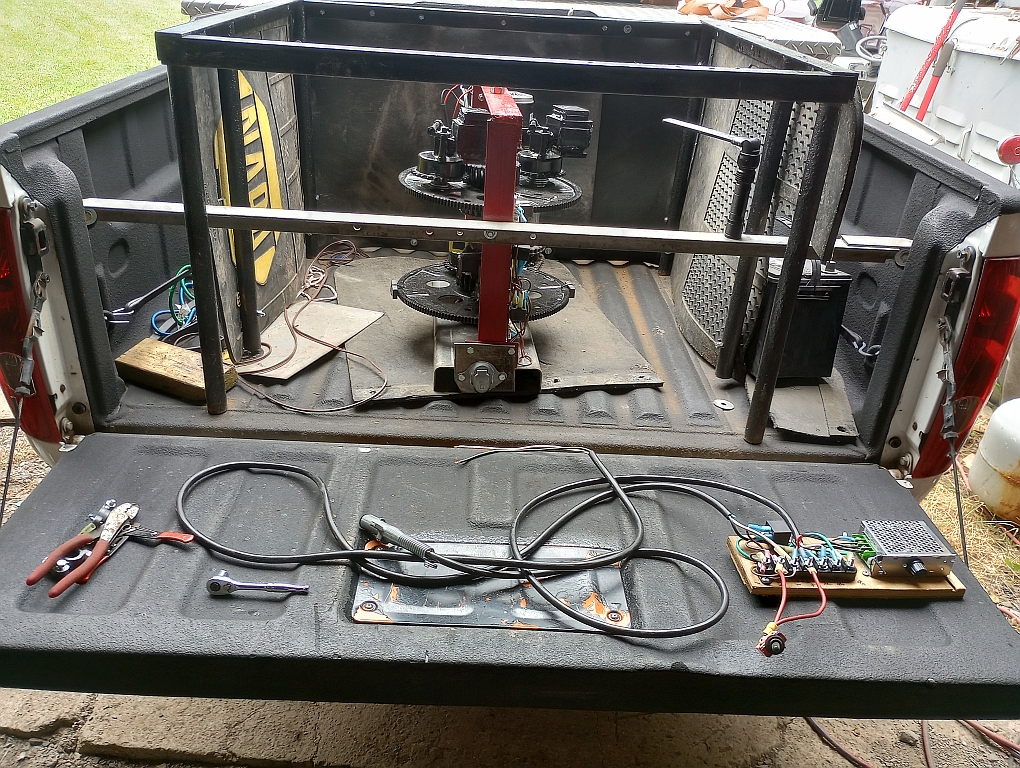
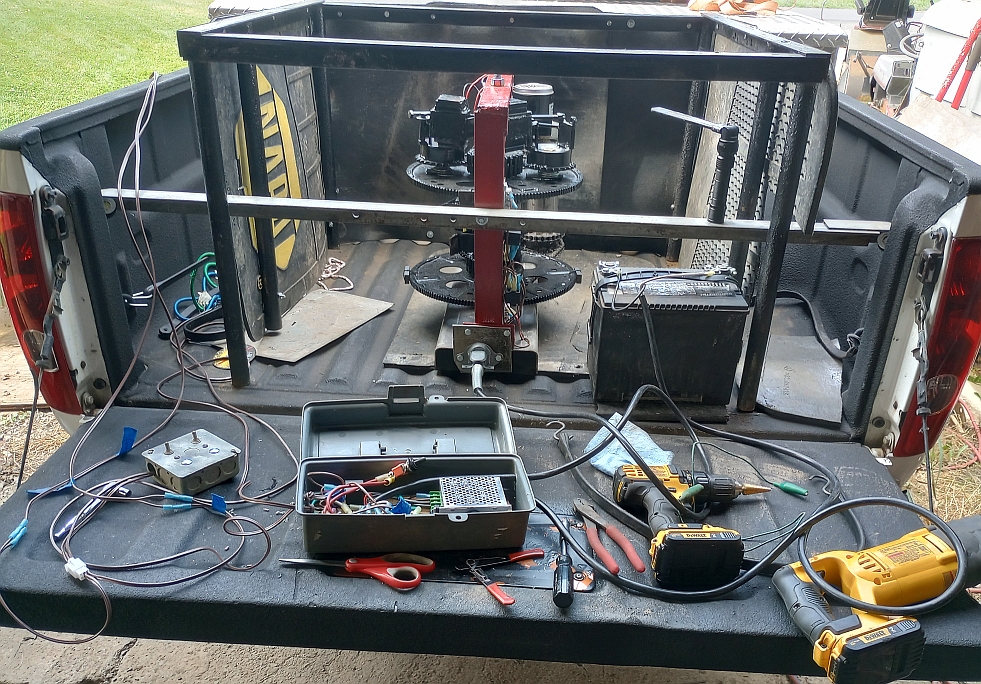
After months of crazy interruptions from home and shop repairs to health issues the PIE 7 is being constructed. I am nearly ready to mount the first beam on a center axle.
But first, an addition to the glossary of terms presented in the last post. While the PIE is a Type-1 machine and the Trammel is a Type-2 machine each can have sub-models and sub-types. The PIE 7 is a PIE Type-2 machine, meaning it is a new breed of PIE but NOT a Trammel.
Now, on to the actual update!
The early PIE assemblies were made to be cheap and easy to build by anyone with a workshop and auto shop type tools. The PIE 7 is a bit of a switch from that to precision machining using lathes, milling machines and other machinist tools.
Along with the redesign of the rotating assemblies, all of the parts for the PIE 7 are machined and fitted with far greater precision than any other PIE has been. Shafts are precision fit into bearings which are fit into machined mounting surfaces. Tolerances are still considered pretty wide for machine shop work as a tolerance of about 1mm (+/- .5mm) is acceptable, For reference for all of us older US based machinists and mechanics, 1.5mm is about a sixteenth (1/16) of an inch.
Initial bench tests of the new dimensions and weighted masses are very promising, and we are hoping that the PIE 7 will perform as well as expected. If it does perform well, we should be able to move a motor vehicle using only the PIE 7.
The PIE 7 is also the first one we are creating proper “prints” (blueprint drawings) for including desired material types and construction techniques along with the customary dimensions and tolerances. The design nature of this PIE is going to be the basis of PIEs to come and the start of what we hope will be a commercial enterprise. The base design will continue to be “open source,” but future iterations may start to take on a proprietary design for commercialization purposes.
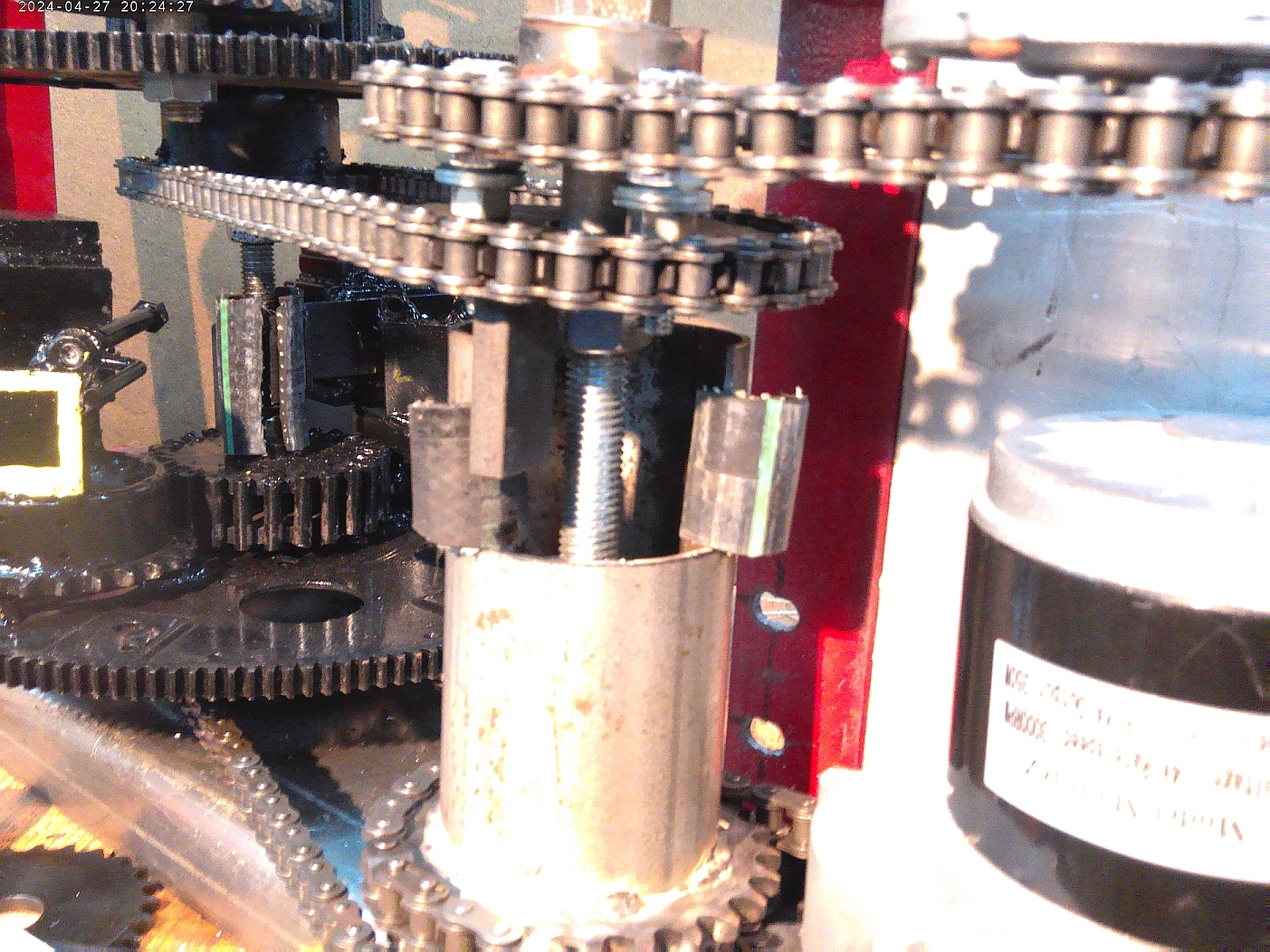
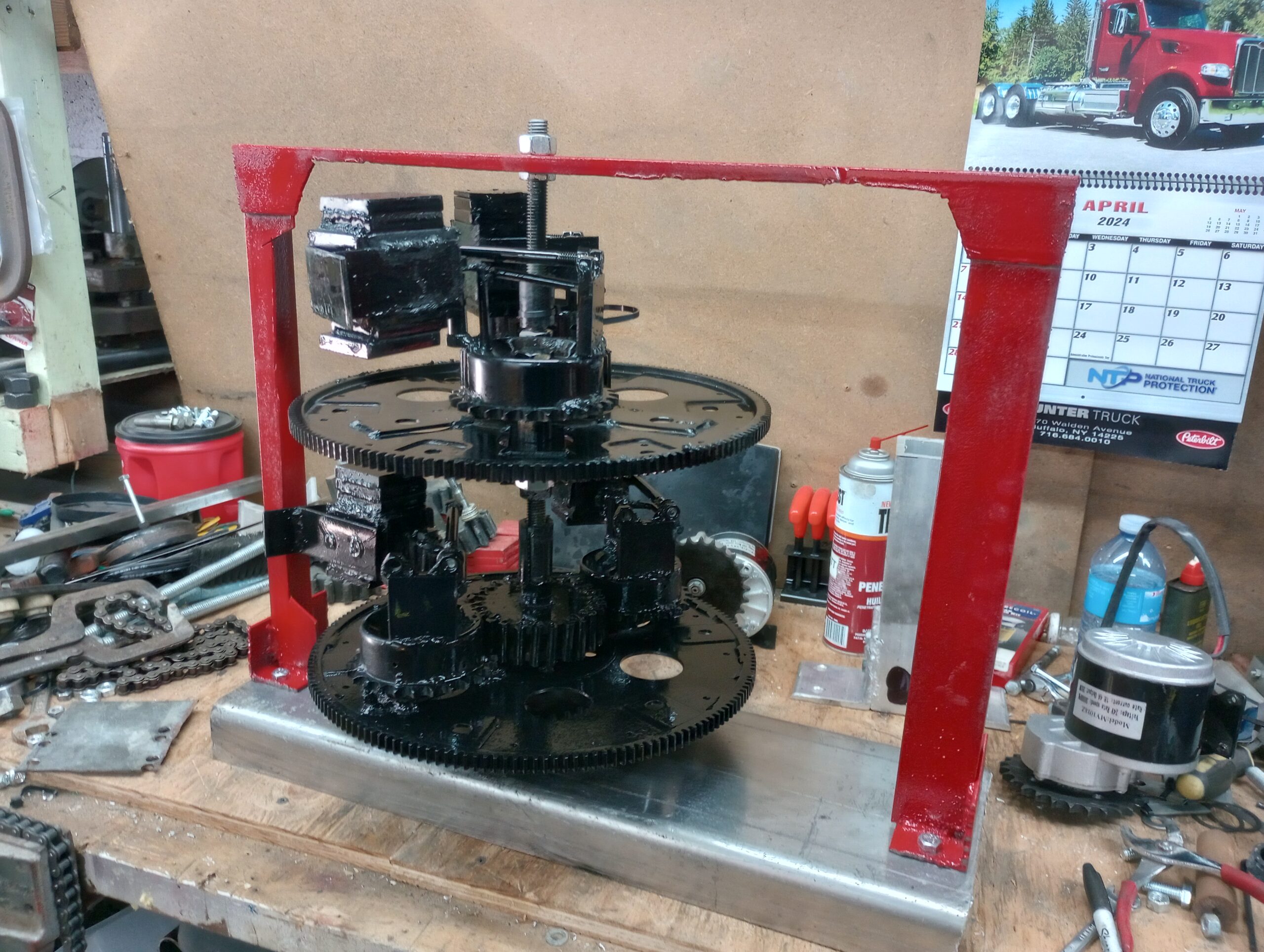
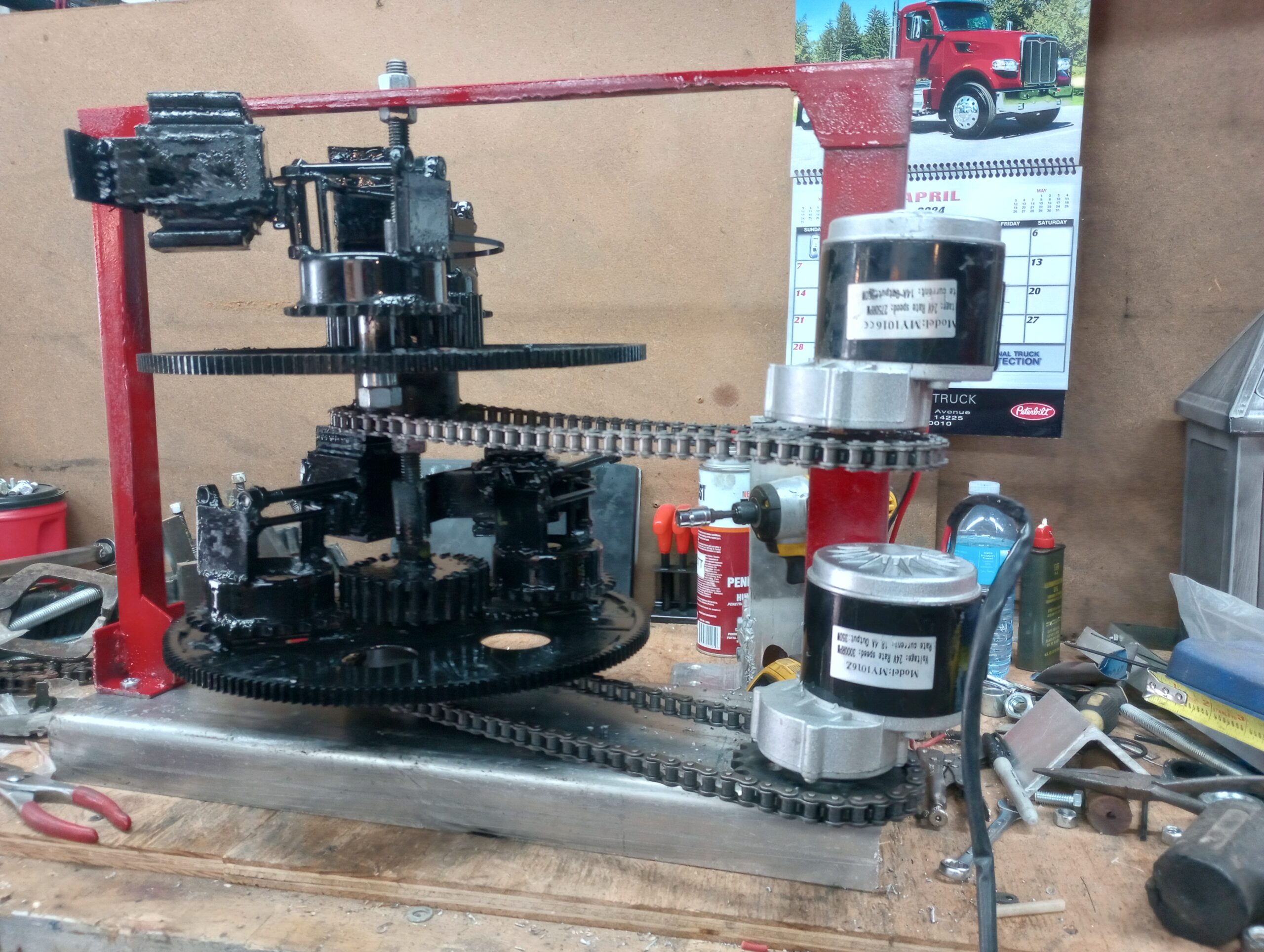
The big changes from the earlier PIEs are in the motor drives (using 2 or more motors), the gear train (using reasonably quiet running roller chain), bearings used for all pivot points, and the use of “beams” instead of “wheels” for the rotating assemblies.
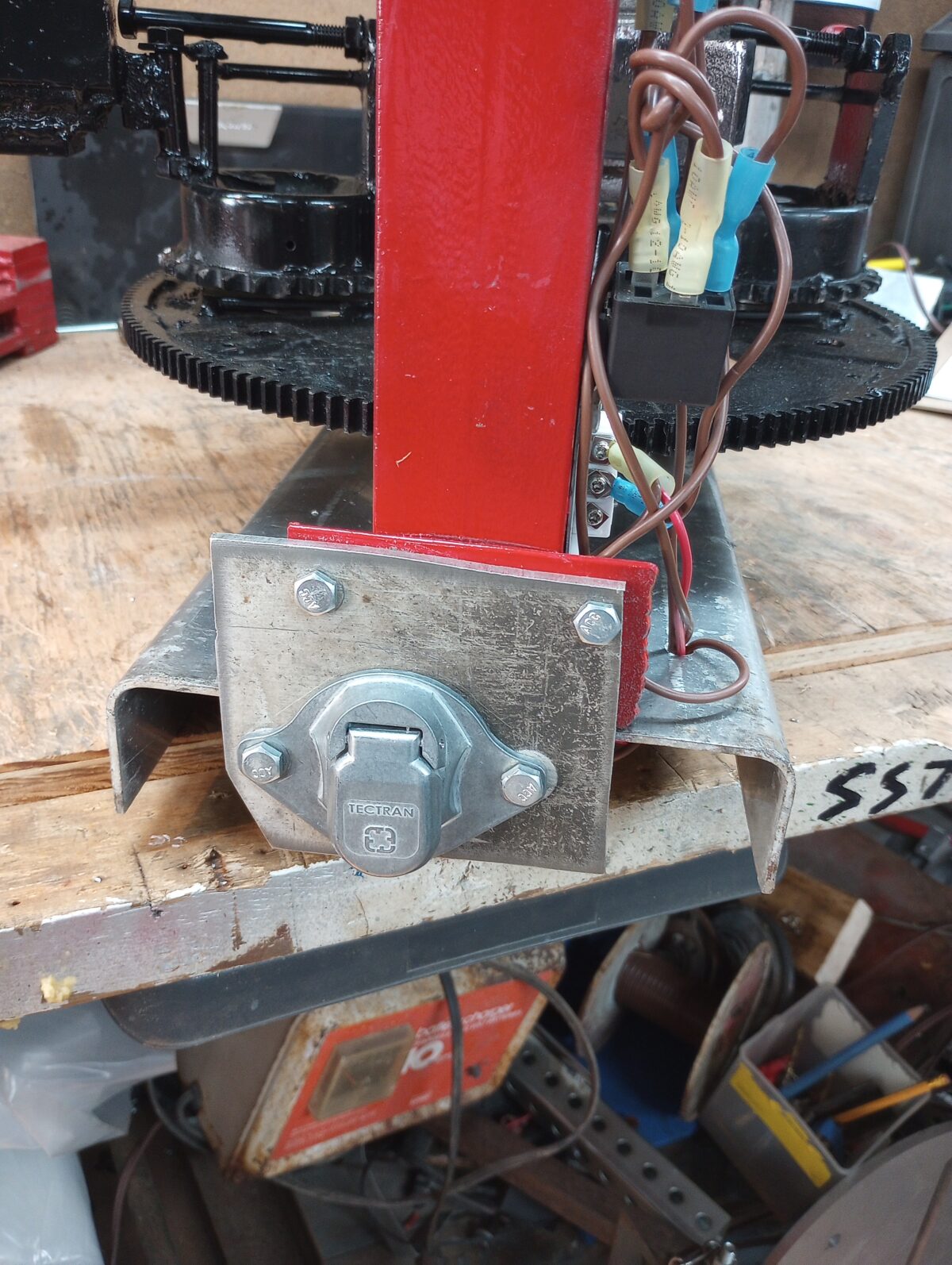
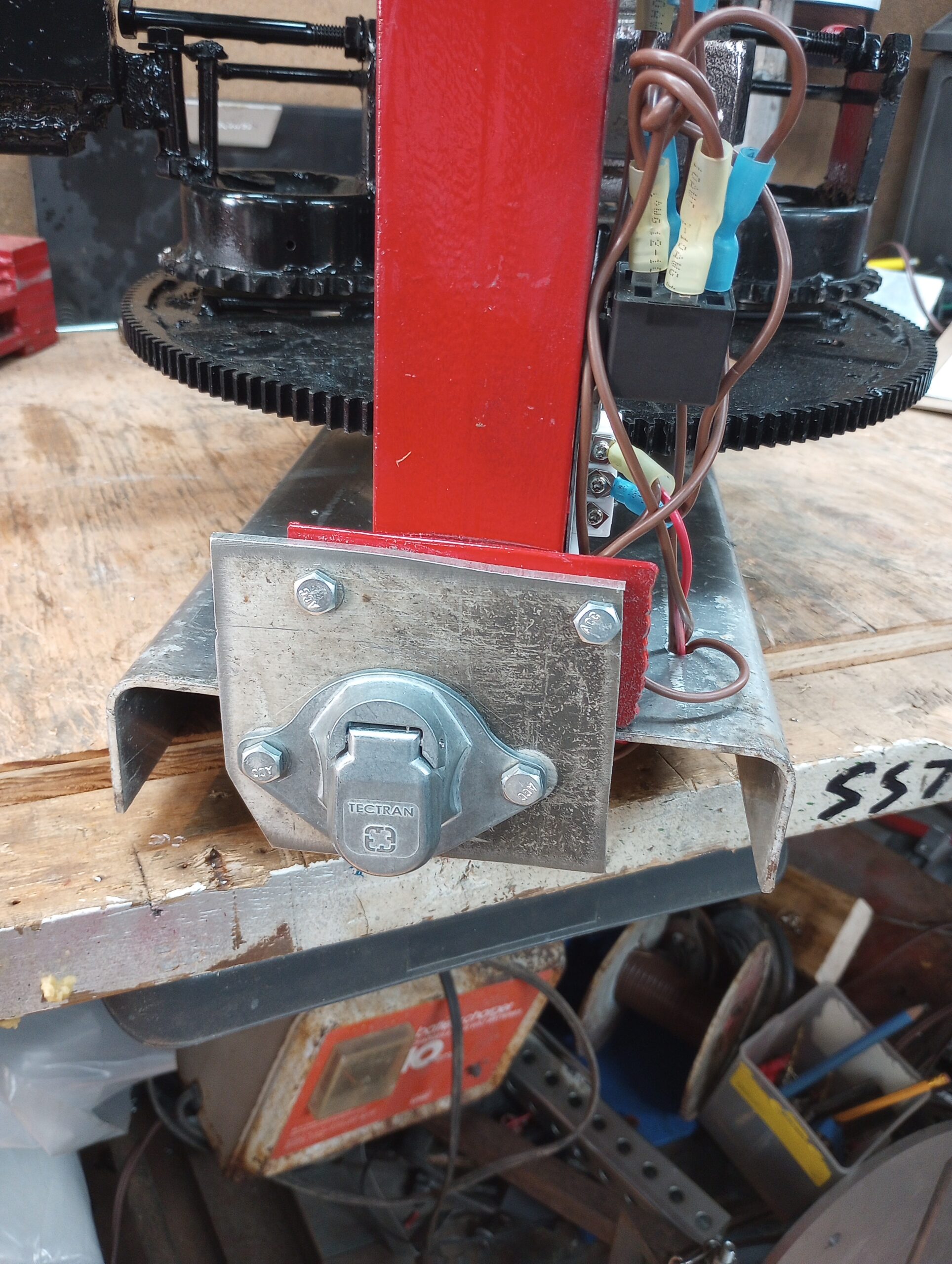
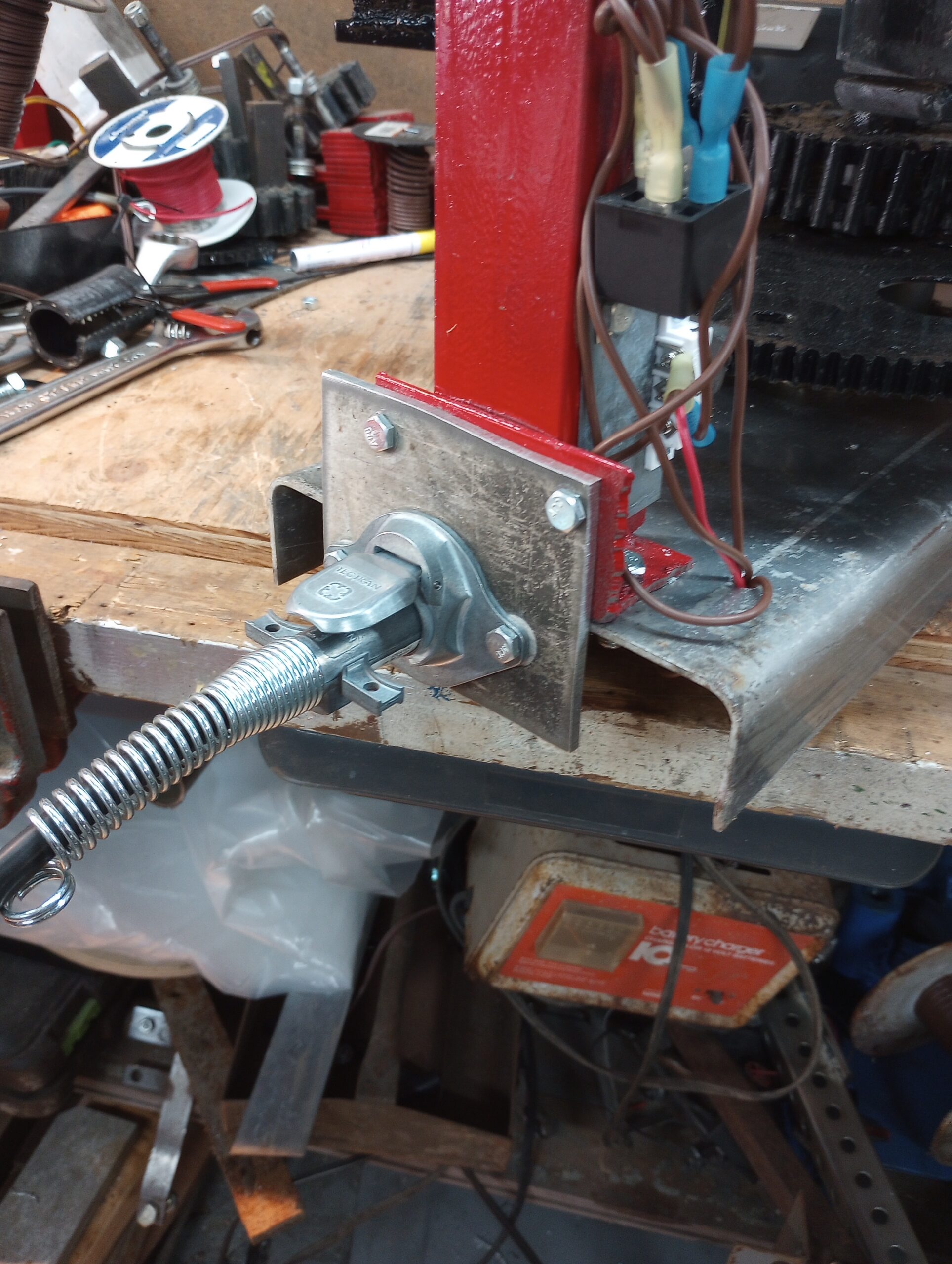
The beam design allows for lighter weight materials (aluminum) and the proper support of the weighted masses on two sides with ball bearings to reduce friction. The additional support and use of proper bearings allows us to use heavier masses and a larger primary radius. There are multiple ways to build this, but I have chosen a 3.5 inch (89mm) square aluminum tube with ¼ inch (6.5mm) thick material as it is reasonably easy to obtain locally, is light weight, is easy to work with, and is a fairly strong material (structurally).
We are fabricating the required idler sprocket assemblies now including making our own idler sprockets.
Here are some photos of the beam, the drill guide used for making idler sprockets, and the first idler sprocket ready for bearings and installation.