Since the PIE 2.0 did not perform as well as expected on the “self-propulsion” portion of testing, it was removed from the pallet for rework on the work bench. The phasing of the upper and lower wheels is the primary area to be reworked as the possible answer to its poor performance.
The PIE 2.0 was not built for easy phase adjustments, so the rework included the removal of all planet gears and axles. The rework is a re-phase of the wheels from a 90-degree offset to a 0-degree offset.
It would be much better to change the phase offset in smaller increments (say 10, 20 or even 40) but since this is the way already built into the design, this is how it is being done.
Fast Forward a Couple of Days Later and “Ground Test #2”…
That has done it! The re-phasing has made significant improvements in the quest for “self-propulsion”! It will now work its way across the garage floor under its own power with nothing driving the wheels!
The upper planet gears and the lower ones now share the same axles, and the wheeled trolley has been made robust with a tubular steel frame and metal bearings as wheels.
I am posting 4 self-propulsion videos to YouTube and BitChute to get maximum viewer coverage and get the information out to everyone.
Regarding subject of re-phasing:
There is a chain sprocket on both wheels and that could be used to drive each wheel independently. A drive chain to each wheel, and the chain can be switched tooth by tooth or the drive sprocket(s) can be made adjustable. A split jackshaft with an adjustment mechanism could be utilized to perform phase adjustments “on the fly” without shutting the PIE down.
After a short pause caused by things in life that have required my undivided attention, I’m back & ready to get busy.
So, the on-road testing would be considered a success, and the “hybrid-assist” effect is undeniable. The “failures” encountered within that round of testing were due to the prototype building methods and materials. It is hard to justify the cost in time and materials for a more durable build when it is being taken apart and changed multiple times.
Total cost of materials for a single planet gear, without the weight, is around $8 US. The cost of a machined, straight toothed, drilled hole center, spur gear of the same size is around $200 to $300 US. In that light, the component failures are an acceptable offset to the cost differential. Now we move forward with further testing of the PIE 2.0 while still getting ready to build a next version.
One thing I have purposely not mentioned are the efforts being put forth by other people around the world to either replicate a PIE 1.0 or 2.0, or to incorporate their own designs into a build of their own. Because of those awesome individuals helping to further this research (thank you again for the help) my next version may be a 4.0 or higher.
Now I will cover the post-road-testing phase of PIE 2.0 testing.
Nothing was changed with the setup in any way between removing it from the truck and installing a set of hardware store straight caster wheels on it. The wheels were attached to 2 pieces of lumber (2X4s) and the lumber was attached to the bottom of the pallet with wood screws. Testing was done on a level concrete garage floor surface, and pieces of sheet steel were laid down under the wheels to allow them to roll as easily as possible.
Results were not as good as I had anticipated. Forward thrust was definitely present. When it was running, I could easily push it forward with one finger, but it would not move forward on its own.
This distressed me greatly, since there is an undeniable and measurable thrust present when used for “Hybrid-Propulsion”. I have pondered this in great detail, and I have several thoughts as to the reason.
1. The wheels roll too hard, and they are also flexing. This combination makes pulsed propulsion nearly impossible.
2. The drill motor is dying. It has worn to the point of reduced torque which means that there is an unwanted & uncontrolled speed variation. Every inertial propulsion design I have ever experimented with has been rendered inoperable at some point in testing because of this phenomenon.
3. Comparing the PIE 1.0 & 2.0 I believe there may be the same issue spoken about with other builder/experimenters regarding timing changes needed to allow a “hybrid-assist” device to be fully “self-propelled”. Since both PIEs work as a hybrid-assist, but the PIE 1.0 also demonstrates self-propulsion I believe this is a solid theory.
In order to prove this theory of the two different “modes” to myself, I started removing weights one at a time from the PIE 2.0 and observed the operational differences. There were some interesting things to be observed, and a lot of very loud noises being made. When I got down to one weight it began to self-propel. It does try to propel itself with 2 weights set 90 degrees from each other, but there is no denying the self-propulsion with only one weight.I truly believe that this may be, in part, the answer.
My next moves are as follows:
1. Re-phase the upper & lower wheels to bring the weights into sync between the top & bottom.
2. Replace the ailing power source to stabilize the RPMs (as these devices get more powerful a flywheel may become necessary to stabilize it).
3. Get a better set of wheels before the next test!
PIE 2.0 All Pretty — Before Being Worked Hard, Out in the Real World
I find that it has been tough to get busy and simply do what needs to be done lately. The PIE 2.0 has had to take a “back seat” to far more important family business, but I finally did get some time to finish up some “real world” testing at a reasonable speed of 55 MPH (88 KPH). It is not an easy thing to find a “flat” stretch of highway in the Northeastern United States (about 350 miles inland), so I have made do with a straight stretch with only some small rolling hills and with an estimated elevation rise from start to finish of approximately 15-20 feet (not verified with altimeter).
As before, measurements are taken and only considered valid if measured values are repetitively similar.
I was able to bring the PIE 2.0 up to slightly over 120 RPMs and test before it broke this last time and left a weight laying in the truck bed.
So, here is a simplified recap of test results obtained on this test roadway at 55 mph withal accessories off and auto trans in 3 (not OD) to help keep it from shifting during the test:
Running at 90 to 100 RPMs, engine load reduction was 6%.
Running at 105 to 108 RPMs, engine load reduction was 8%.
Running at 120 to 122 RPMs, engine load reduction was 13%.
At 120 to 122 RPMs the “feel” of forward thrust was much smoother although overall vibration was fairly pronounced.
During the final test run two things happened causing testing to end for the day.
First one of the weights found its way off the planet gear and into the bed of the test truck.
Second, the drill motor overheated, slowed and finally stopped until it cooled off.
Note that the picture on the left shows an added piece of metal welded to the frame to keep the drill bracket from shifting position which was a key problem with the drill’s chuck “slipping” on the shaft.
Results: The PIE 2.0 design is a viable Hybrid design!It definitely needs a better build (no prototype temporary components), a better motor, and a sound deadening enclosure, but this is a repeatable, working design that can be built on a budget!
Conclusion of This Round of On-Road Testing: I am way past encouraged and I am soooo ready to build the next gen “PieTech” design. There are others also working on their own versions of a PIE so I really do not know what version my next will be, but I know it will be able to run at more than 120 RPMs!!!
The PIE 2.0 is, overall, a resounding success and it will be repaired. I do want to perform some “self-propulsion” demos with it before I consider it finished. I am hoping to video it on wheels and on water. I have had 1 request for a pendulum test, I do not consider it as accurate since it is too easy to skew the outcome by simply moving the center of gravity, so I have not seriously considered it yet.
After some unexpected personal business (death in the family) to be attended to, I am excited to pick up where I left off with the PIE 2.0. I had to remove the test rig from the test vehicle in order to transport several loads of “rubbish” from a deceased family member’s apartment to be delivered to either a charity donation center or a dumpster for disposal.
The Pie 2.0 is fastened back into the test vehicle, testing routs are mapped out for highway speed testing, and I am ready to start recording data.
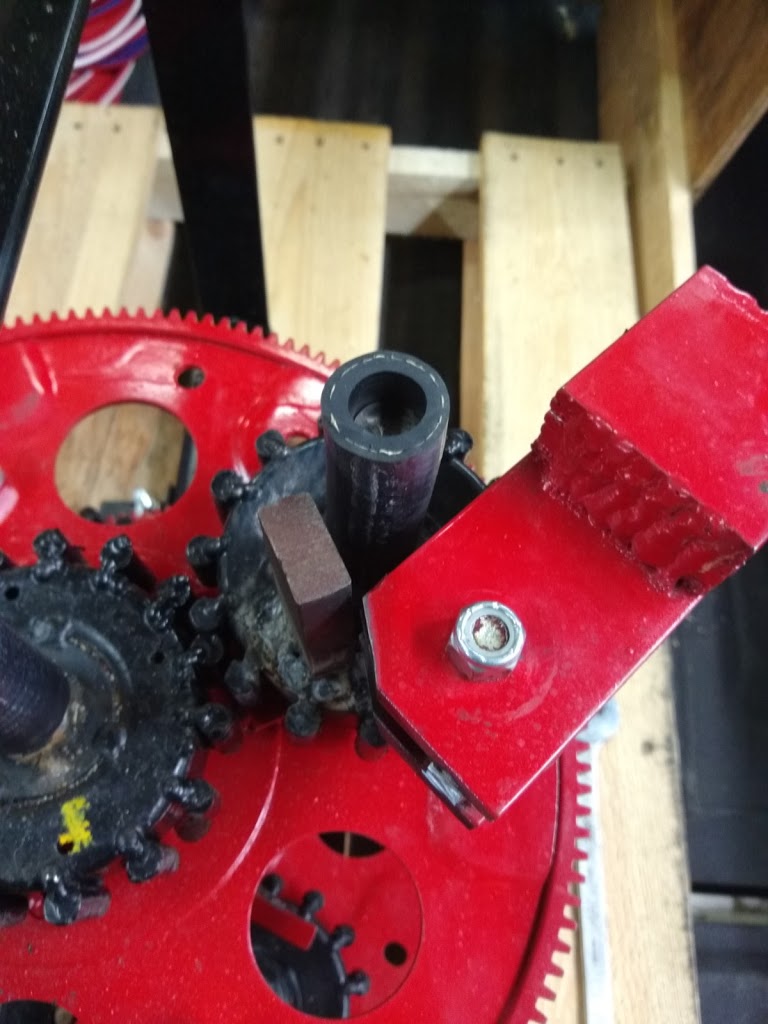
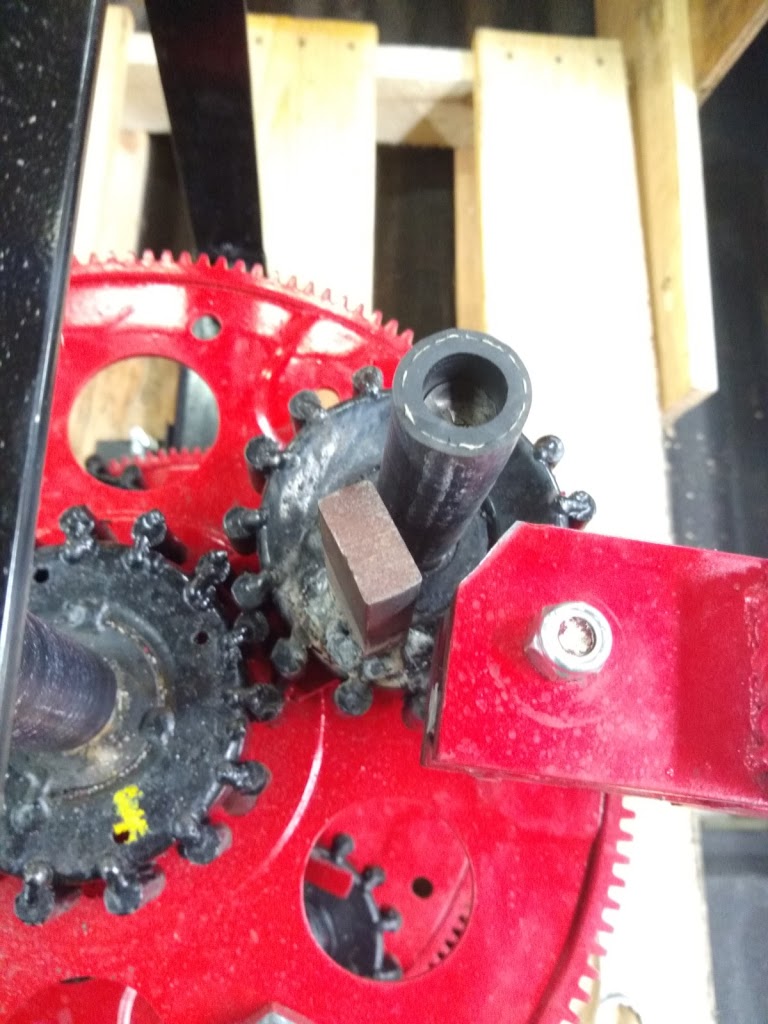
As seen in the photo above, I have also been working on an improved method of obtaining and making planetary gears. The latest idea on this front is an inside-out chain drive/sprocket assembly. I don’t think that it is a long-term production solution, but it seems to present a reasonably inexpensive alternative to making gears from scratch.
The nice people at www.RollerChain4less.com(Nitro Power Products, LLC) have 17-tooth idler sprockets with a 5/8” bore bearing installed (P/N: 40BB17-5/8) available for $11.98 USD at the time of this writing. They also have 17 tooth plate sprockets with a 5/8” center hole (P/N: 40A17) available for $5.75 USD at this same time.Feet of #40 roller chain from them (P/N: RC40-1R-10FT) is just $16.37 USD, and they are one of the few companies that offer specialty connector links known as “Attachment Connecting Links” very reasonably (less than $2 each).
So the inside out chain sprocket is basically removing the teeth from a plain sprocket and fastening a chain to it in place of the missing teeth, effectively this creates a “male” and “female” gear set. The chain can have the rollers lay into the remaining recesses of the original tooth pattern and can either be welded in several spots, or connected at the ends with an offset link and fastened to the gear with “attachment” links. I chose to simply weld the chain onto the modified sprocket it for the first prototype gear. I cannot tell you how it is going to work out yet, as most of my shop time is being usedto adjust and collect PIE 2.0 test data.
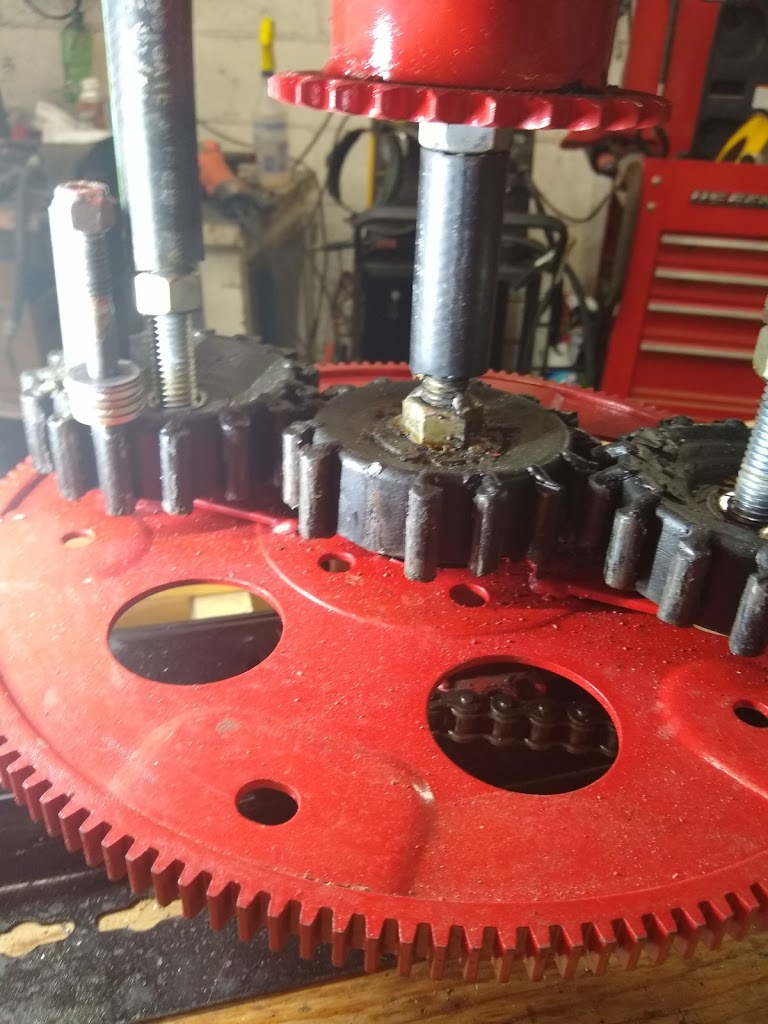
A quick update, gear failure with pictures:
I attempted to install a pivot for the weight on the idler sprocket. These idler sprockets are hardened. The weld will break off with little effort, and if you do manage to get a hole drilled trough the gear, tightening a 6 mm bolt is enough to crack the gear. The plate sprockets are plain steel and can be drilled and welded, so I guess I will be mounting a bearing on one of them.
Welds Popped Off
Welds Still Have Sprocket Metal On Them
Ground Flat and Drilled – Cracked When Tightening Bolt
Ground Flat and Drilled – Cracked When Tightening Bolt
The PIE 2.0 is running much better now, and although it was not without frustration, I was finally able to make some test runs.
I did have to make some repairs to the lower sun gear and I also corrected the crooked outer stop. One of the teeth on the lower sun gear broke off and when that happened the lower wheel started “jumping timing” like crazy.
When the failure(s) happened, the timing got pushed to the 11 o’clock position and that is a bit too “retarded” or “late”, the planetary alignment position (I like that terminology) should be a bit earlier at about 10 o’clock. This late timing is very evident in the PIE’s upper framework, when running at just over 100 RPMs the upper frame deflects to the right which tells me I am losing forward propulsion power.
I am fortunate enough to be able to see the upper part of the pie in my rear view mirror while driving so I was able to visually see that the timing was off.
I took a short video of the sideways movement to demonstrate this to anyone building a PIE, I will show it here but I probably won’t post it on YouTube or Bitchute since it falls under the heading of a builder’s note but here it is.
During testing, I did not have the tools with me to adjust the timing (won’t make that mistake again – I hope) so the results listed below were obtained with incorrect timing.
Testing:
To eliminate variations in atmospheric and fuel conditions, all comparative tests are run consecutively.
Test Track: 1.2 miles with a 20-mph speed limit (during business hours) around a nearly abandoned shopping mall with 2 stop signs.
The Scanner used to collect the data is a Matco Determinator, which is the Matco branded OTC Pegisys scan tool system, and the test vehicle is a 2005 Chevrolet Colorado Z85 crew cab pick up truck with a 3.5 liter engine and automatic transmission.
Multiple passes were made both with and without assistance while monitoring vehicle speed and engine load on graphing scales with a running average counter. There were some anomalous results obtained that showed both better and worse results, so they were “thrown out” and only the repeatable results were used to obtain that which is shown below.
Average speed measurement during all test runs was maintained at 17 to 18 mph.
Well it works, but as with any new design there are issues. I have put around 19 miles on it and it really does seem to work well, when it will keep running.
First and foremost is the locking up problem. The little springs did a reasonably good job of stopping the lockup on start-up, unless I started it at a bit of a higher speed. High speed start-up would overpower the springs and locking was still an issue. Then came the locking problem while driving. Every time I might hit a bump, or tap the brakes, it would lock up. So, I took the weights off, cut the metal tab off for the outer stops, and welded stops onto the planet gears. One corner of each weight then had to be trimmed so it would not hit the new stops and viola, no more locking. I did get one of the stops a bit crooked, but I will fix that next week.
Second was the drill motor kept cutting out. Apparently, there is a bad spot in the variable speed trigger, and (of course) I found it. With the new stops came a bit of a smoother run at higher speeds, so I upped the speed and the motor no longer stopped randomly… Until the fuse blew… Replaced fuse with circuit breaker and then the chuck loosened up on the chain drive shaft…
The PIE did lock up one more time, because of the crooked outer stop (that I WILL be fixing next week) the weight hit it hard enough to slip past it and lock on the back side. Reset and speed reduced slightly it seems to have worked fine on the last trip around the block, although there is a definite speed to power correlation. More speed=more power!
Once testing on this model is complete, a high-speed unit is definitely on the drawing board!
I do have to wonder why… Why it is that when testing on public streets and roads it seems that every bad driver within miles is attracted to the test vehicle?!?!? Getting tailgated, cut-off, swerved at, nearly t-boned, and behind extremely slow drivers happens every time. I sure am glad it’s Friday!!!
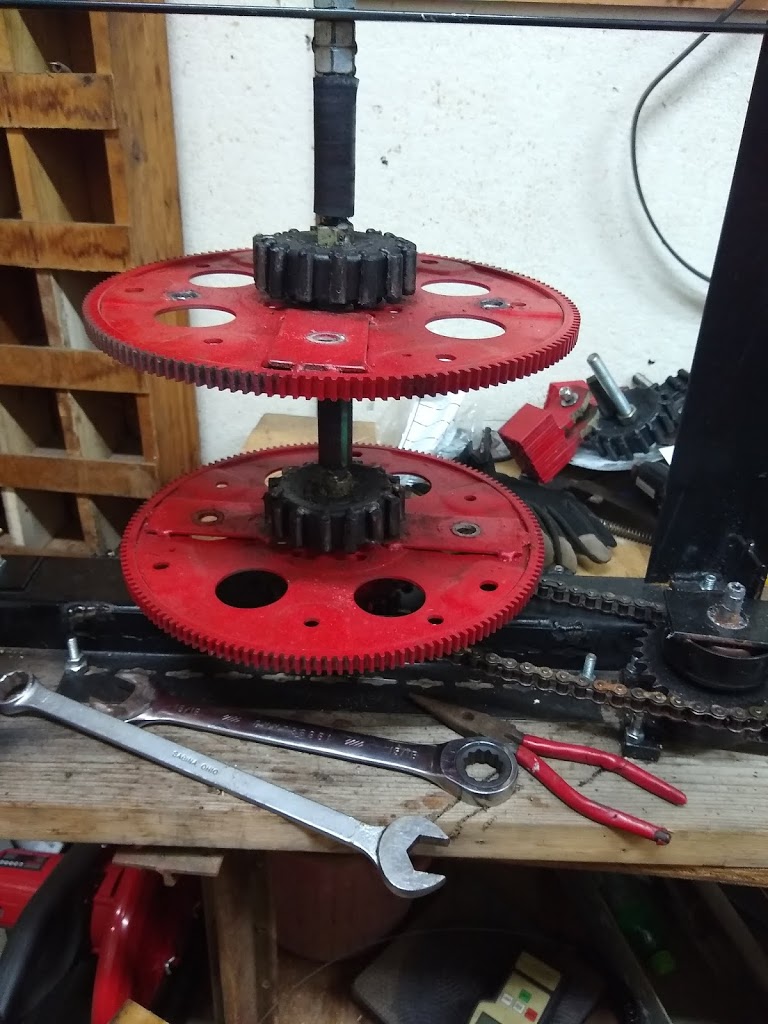
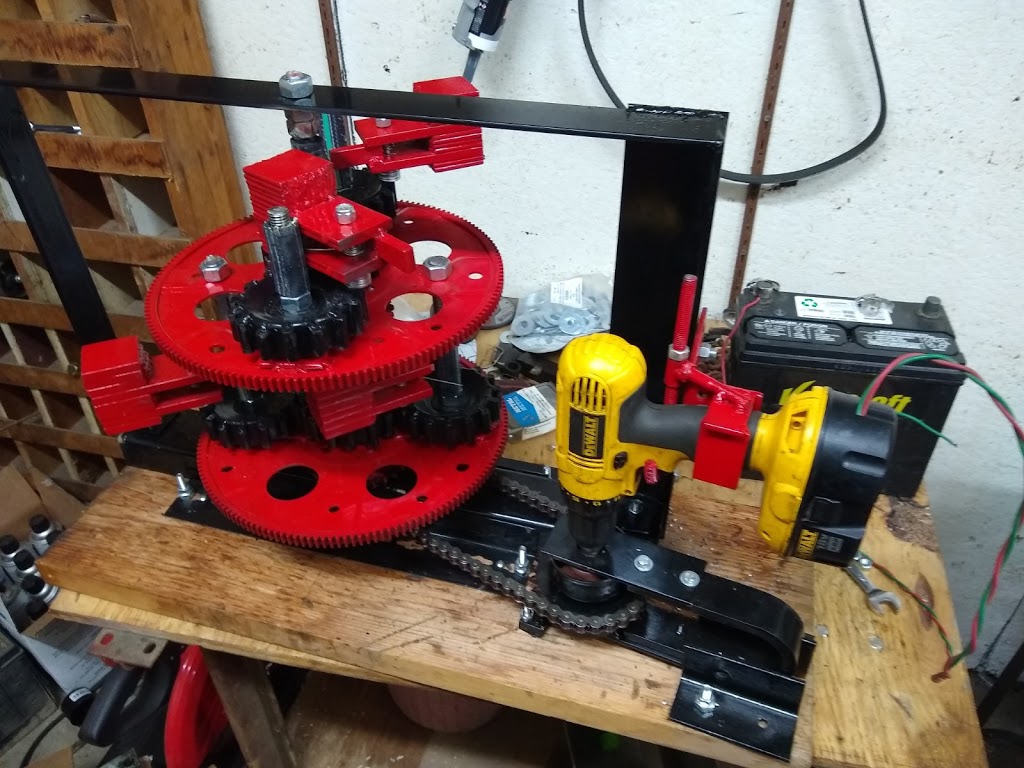
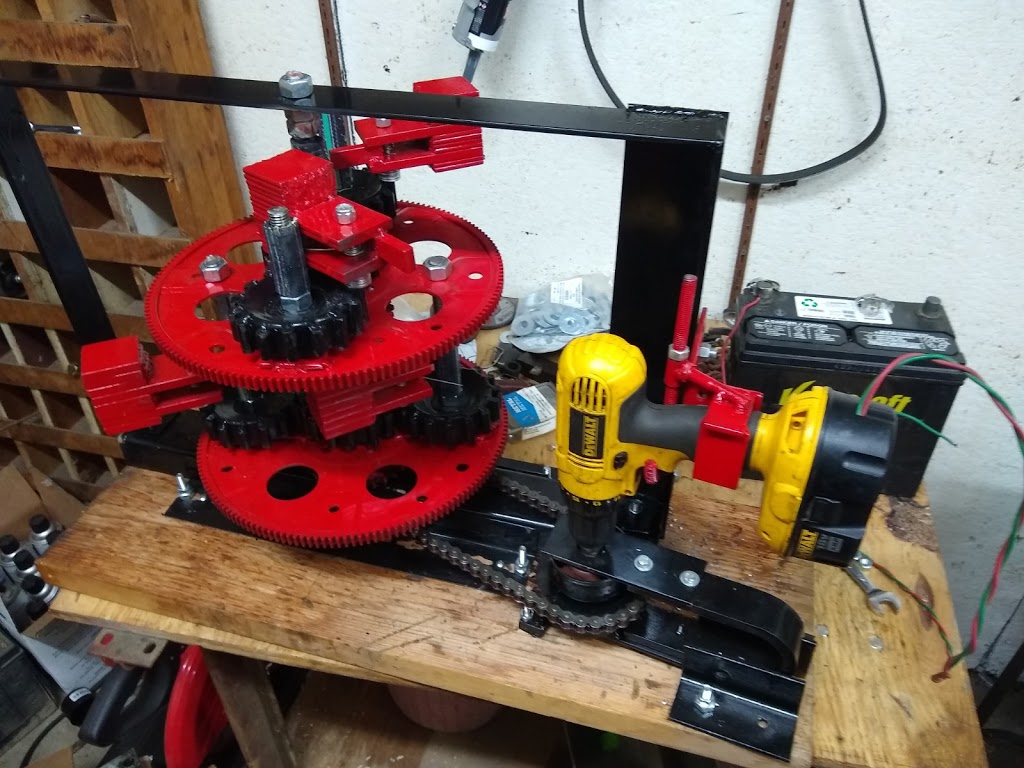
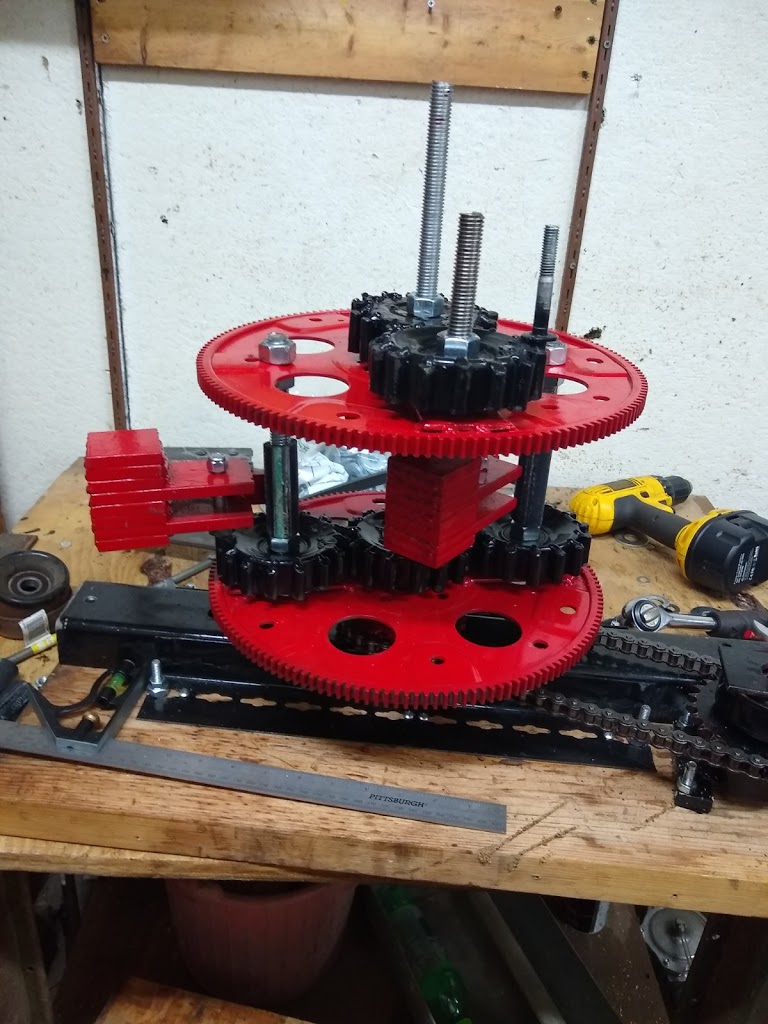
The PIE 2.0 is basically ready for real world testing. The PIE is fastened to a pallet and is being driven by the cordless drill used to test it. I made a bracket for the drill and “gutted” an inoperative battery pack so I could connect wires easily. This allows me to power it from the vehicle’s electrical system or a 12V battery so that a simple on/off control is accessible to the driver.
PIE 2.0 Ready to come off Work Bench
The Power for the PIE 2.0, and the Bracket for the Drill
I do still need a weather cover as it will be tested in the same pickup truck as the PIE 1.0 was, but that is the simple part of the whole project.
I want to reaffirm the intent of the Grassroots Mechanic Movement (GMM) to freely distribute and promote the “reactionless” propulsion technology of the Pulsed Inertial Engine (PIE). I do not advertise the Grassroots Mechanic Movement, and I do not charge anything for the full disclosure information published either here or on the blog. I also do not have any monetization (at this time) of my videos or the blog. The videos are available on YouTube as well as Bitchute and I find it rather interesting that there are a lot more views on Bitchute.
I encourage mechanics, tinkerers, technicians, and anyone who is curious to build one of these and PLEASE post the results.
Too many people who made public statements and videos about this tech claimed it was not workable, but they also did not follow ALL of the original instructions laid out by the original inventor, Brandson “Roy” Thornson. The important internal “trigger” mechanisms were not built and installed, so the “replications” weren’t really replicas at all.
Check my videos, actually read my blog, download the shared files listed within the blog, visit MeWe, and then go to your workshop and build one for yourself. I have laid out the build to be as inexpensive as possible utilizing many used parts from the auto recycling yards, scrap metal pieces and even custom building the gears without a machine shop.
In less than 1 weekend of puttering around the garage (like many of us do) any hobbyist, or home mechanic, with a grinder and a welder can have a single wheel with 1 weight working and proving that this technology works.
I have repeatedly said that I would make this project 100% open source, I am keeping my word and even though I don’t have it ready to run yet, I am posting a reasonably major update now.
I have not posted any real updates as to the status of the PIE 2.0 build in the last few days, so here is what I’m up to.
The PIE 2.0 is progressing very well so far. I had a problem with the weights “jamming” on start up because I am using the planet gear axles as the outer stops. This seems to be alleviated by using very weak torsion springs to push the weights out of the position that jams the rotation. The springs add very little to the force of the weights swinging outward and should pose no significant change to operation. I will include more info about the springs if anyone requests it, and if there is someone following this who is also building a PIE 2.0, I can get these springs for you if you let me know.
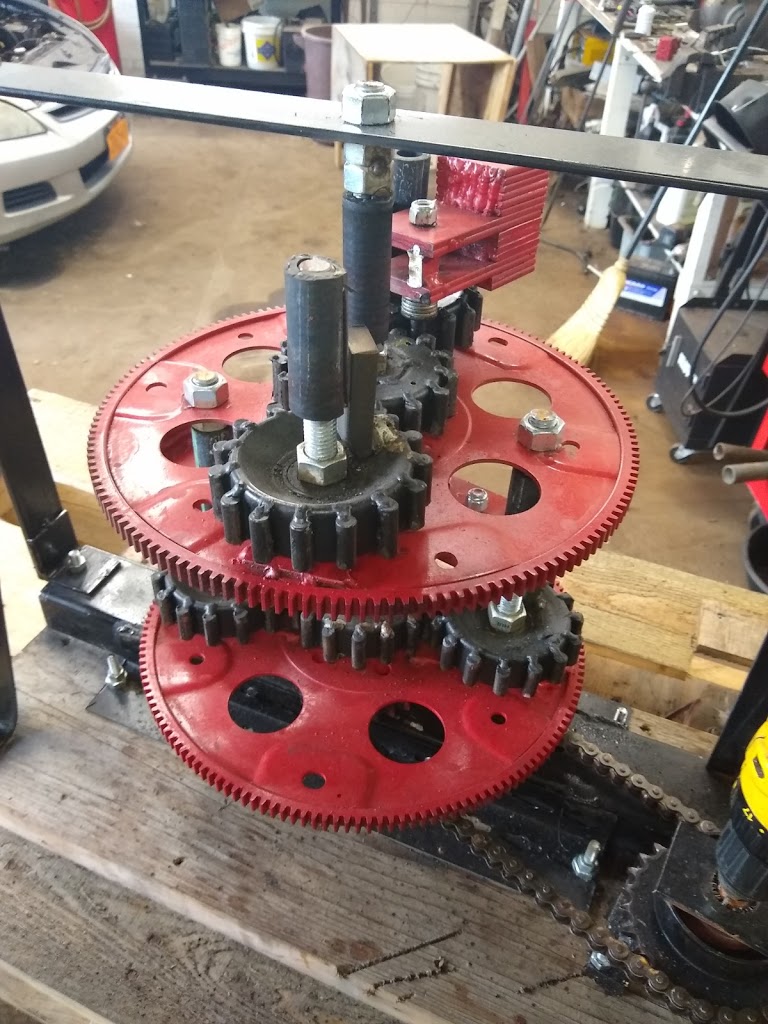
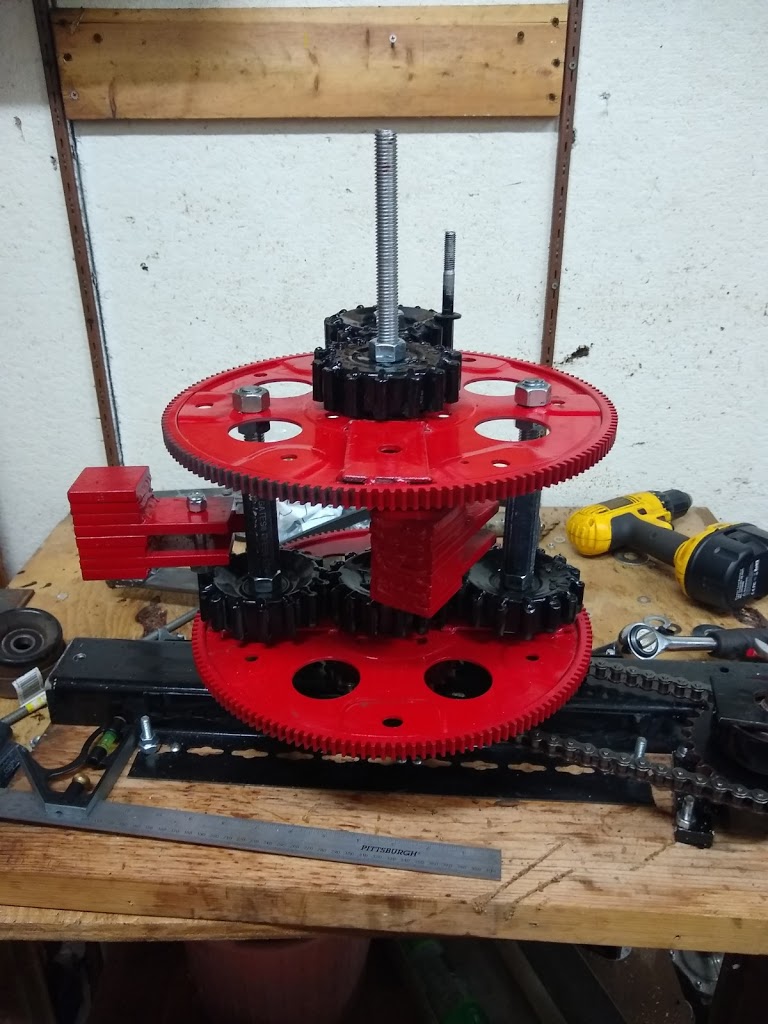
The significant portion of this update however, is the addition of a second wheel. Instead of adding it next to the first one, the new wheel is mounting ABOVE the first (or primary drive) wheel. The phasing of this upper wheel is designed to be at 90 degrees. This gives the PIE 2.0 4 pulses per revolution and should be a very significant improvement over the PIE 1.0’s single pulse per rev.
Double Decker and First Trial With Torsion Spring
Three Weights With Torsion Springs on New Double Decker Design
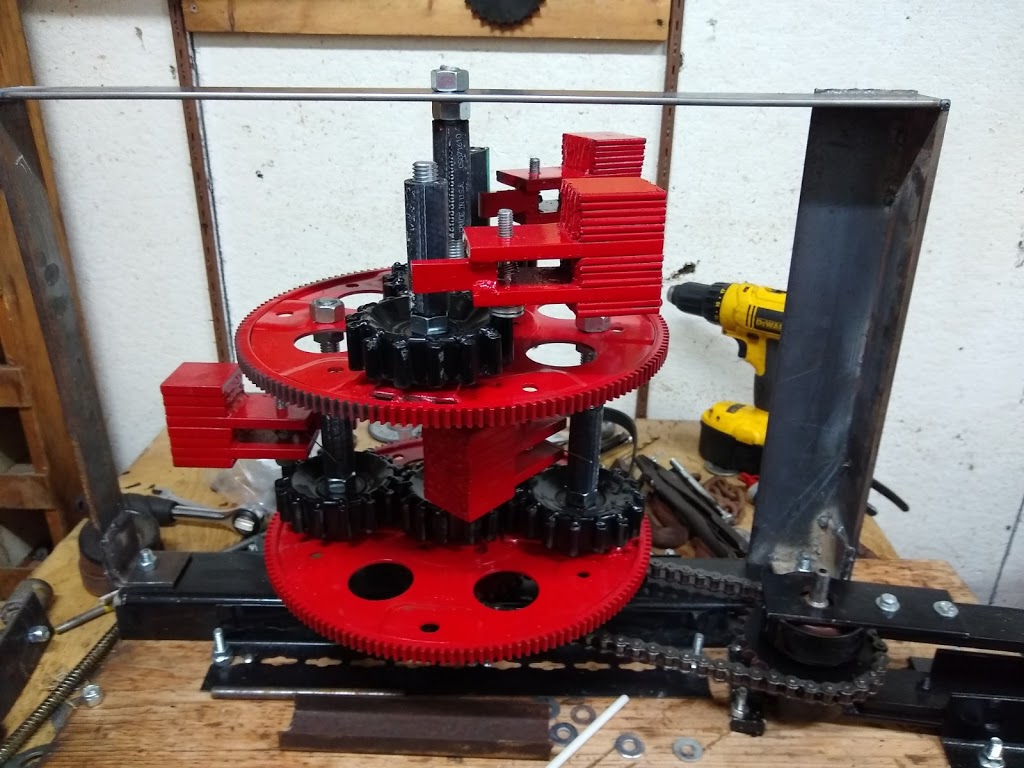
This significant change is an integral part of the now modular nature of the PIE 2.0 and “should” be a design that can be expanded in time. It also gives the PIE 2.0 a much smaller footprint, this will allow it to be installed and used effectively in much more confined areas.
This modular design could also be further developed with a logic controller and individual stepper motors controlling each wheel. That would allow non-linear build designs that can be suited to custom applications.
With this new “double-decker” design, I am also enhancing the framework so that (hopefully) testing can be completed without the unit breaking itself too badly under load. Remember that this is still a prototype and prototypes are built to reveal flaws and weaknesses as well as being a testable model.
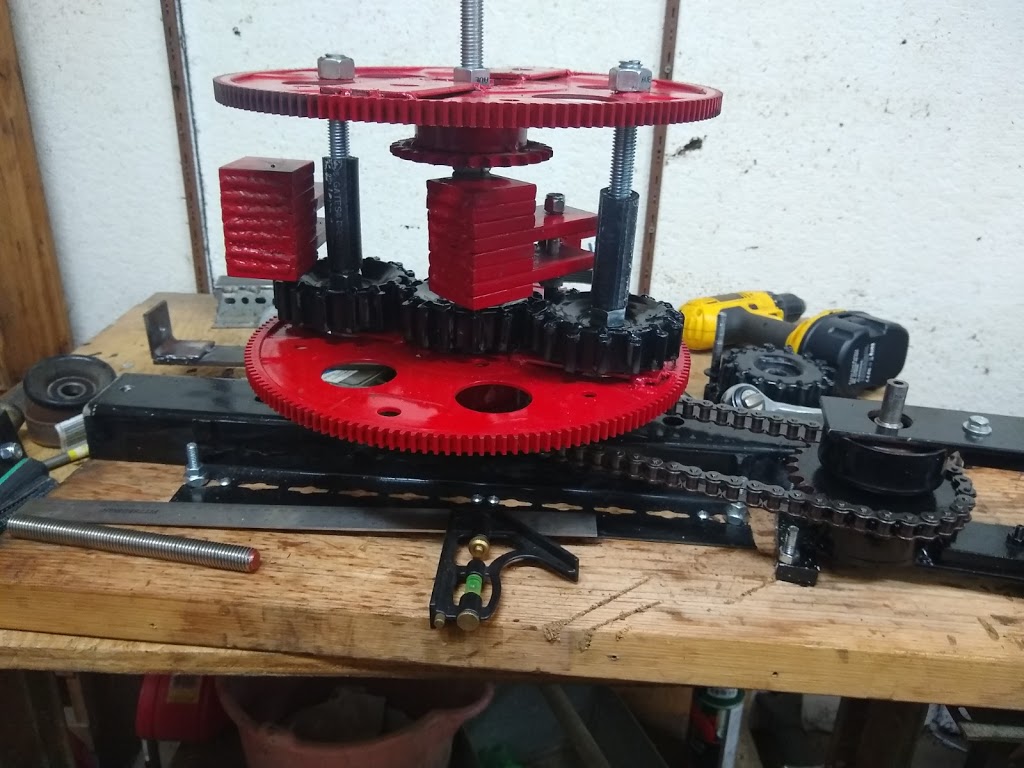
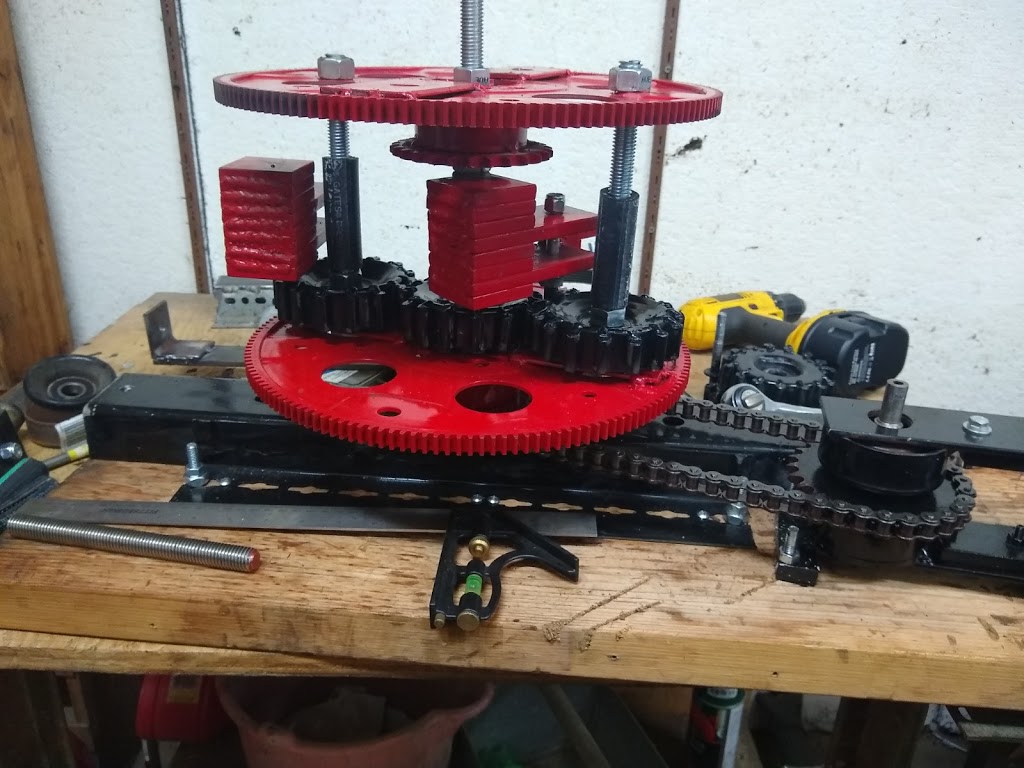
The PIE 2.0 build continues as the new chain drive works very well and the unit is now being assembled on its own base so that it will be mobile. It is a notable observation that the PIE 2.0 pulled the work bench out of place on multiple occasions during individual component testing.
Bench Testing
It is easy to see the rpm variation potential now that slip is eliminated between the drill and the PIE’s wheel. For testing purposes, I have braced the drill with a piece of metal so it wouldn’t keep pulling it back and causing speed variations since I was not holding it steady enough.
As I continue the build, I still have not decided on a motor to power it. I do not want to commit to any particular motor design or speed, before doing some initial testing. There is still more work to do before I get to that point, at which time I will post those results here as well.
I am certain of is that if the PIE 2.0 becomes much more powerful, the whole unit will need a redesign so that it does not tear itself apart!!
I am also considering installing some very light weight springs to keep the weights from folding inward when it is not running. When that happens, the assembly can jam and not turn, it is as close to a “backfire” as the PIE 2.0 can have. The springs need to weak enough not to affect operation, but strong enough to do the job. I made it work with rubber bands, but they certainly won’t last long. It is something to think about.
Addendum 6/11/2020: As I was thinking about the possibility of adding some sort of spring (rubber bands work well) I noticed a spring clamp in my toolbox. EUREKA!! That is most likely the answer, a torsion spring! Like a mouse trap spring, the torsion type spring might be exactly what I need to keep it from “stalling on startup” without applying enough force to change how the PIE 2.0 works!!!
Bench Testing Chain Drive with Drill as Power Source
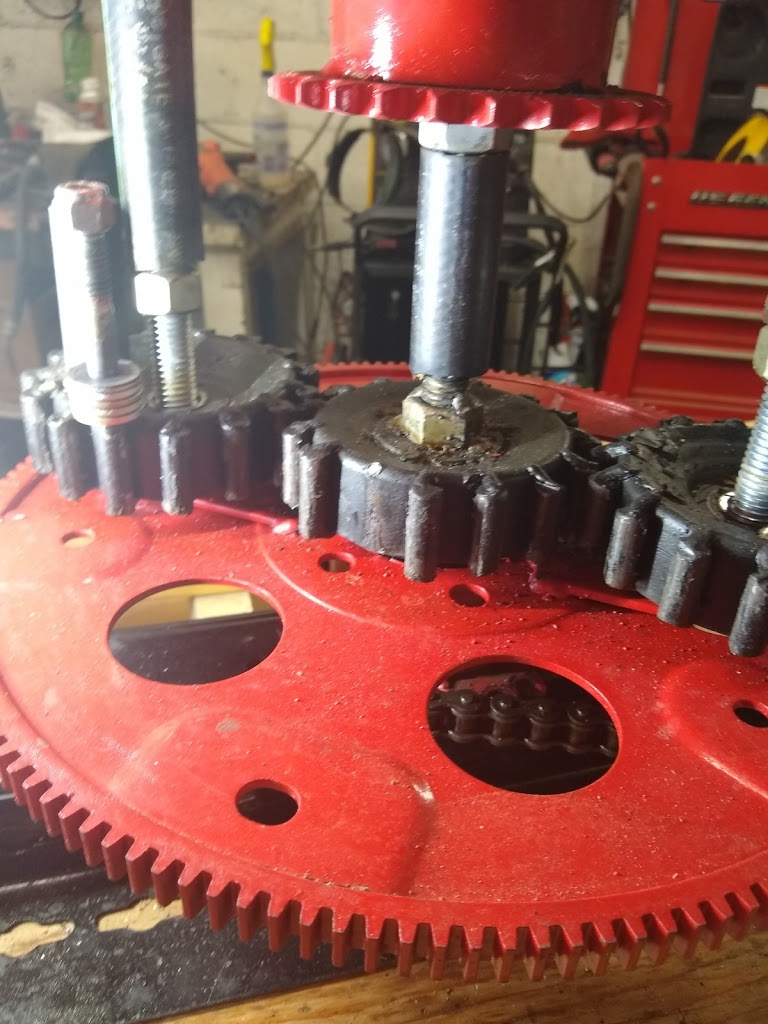
I finally got my sprockets for the chain drive! They are surplus so there are nicks and dings, but nothing a file won’t easily fix. They have an “unfinished” one-inch (25 mm) hole, that puts the hole slightly undersized, but that actually worked out in my favor for use on the jack shaft as it made for a nice press fit on the 1” section of shaft. I then welded the sprocket into place on the shaft to make it a permanent install.
I used a plasma cutter to open the 1” holes up on the sprockets being used on the wheels, that way there is no need for spacers to mount them on the axles. Cutting the hole open like that is ugly, but I don’t really care, as it cannot be seen once it is installed.
I put it together enough to see the chain drive work with a cordless drill running it up to approximately 1500 RPMs. I still need the parts bolted to the plank base so that nothing can shift position with the weights installed.
I believe that I will wait to finish the drive assembly with a motor until I can see how much power it is going to take to make it run, and at what RPM. I have several large electric drills that I can use to do those tests if necessary.
Truing a Sprocket on a Wheel Assembly, Getting Ready to Weld
Bench Testing Chain Drive with Drill as Power Source