As 2020 comes to a close, I look forward to what 2021 will bring. “Normal” life was suspended, the MSM news cannot seem to find anything to report that doesn’t have a carefully scripted narrative, alternative news sources have come under fire from big tech and the MSM, but those of us quietly building, designing and experimenting found the slow-down to be a productive time.
It has been a strange year but there has been a great deal of progress by “amateur” researchers and experimenters, so I thought it only right to recap some of the more important inertial & gyroscopic propulsion findings of 2020.
From esteemed engineering professionals to a host of virtually unknown tinkerers (me) and from all parts of the world, approaches to building a fully functional inertial drive system are quite varied but the experiments publicly presented have erased all doubt that this is a valid (although infant) technology which will soon be a budding mainstream industry.
Early in 2020, the early evidence presented and posted on video platforms such as YouTube and BitChute was still drawing a LOT of negative attention from some “learned” “experts” who unequivocally argued that all working units are fakes designed to defraud the unlearned public. Most of these demonstrations were genuine, and many of the online attackers were nothing more than “trolls” attempting to keep honest people from discovering anything meaningful. I am not going to speak for the many brilliant people who have designs of their own, I will only mention the work I have done over the last 12+ months.
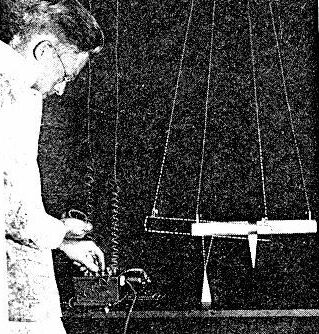
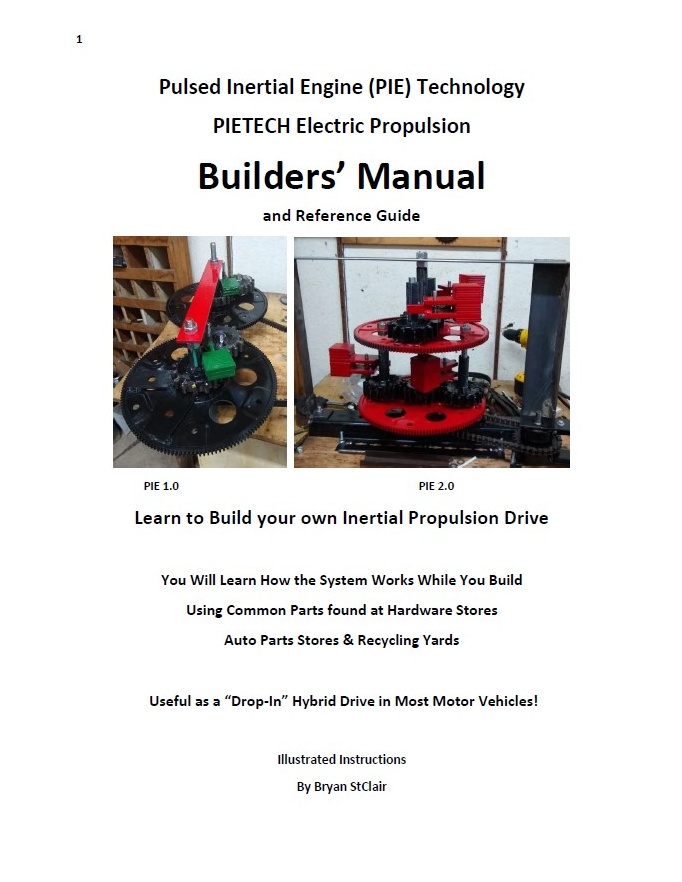
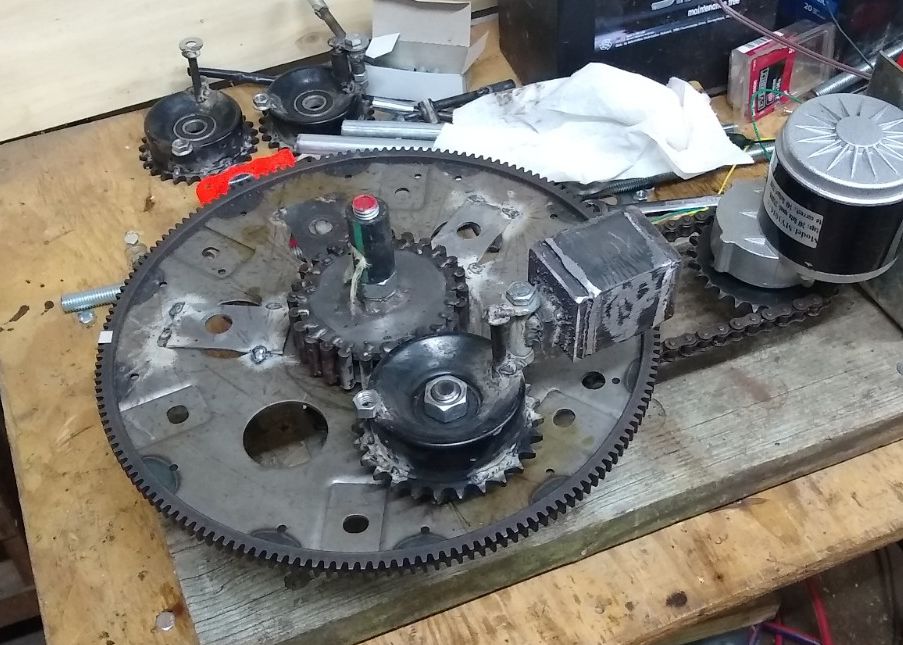
In 2019, I had finally built a proof of principal gyroscopic design of my own design when I happened upon the work of Roy Thornson. I saw his design as a highly workable and developable device that should be replicated and improved. So I shelved (but kept intact) my initial work and switched to the Thornson design. I downloaded everything I could find, bought every available technical reference, and eventually even contacted someone who knew Roy personally. Within a month or two, I had a Thornson based replica that could self-propel across a workbench and I was “hooked”.
I decided that because I had built a working model that could easily “go missing”, the safest way to keep both it and me safe was to make every step public, free, and open source. So all the building steps were posted to a blog (this blog) and the machinery itself video recorded and publicly released. I hope that my work can help someone else with their journey.
The things I learned and overcame regarding inertial propulsion are all posted publicly, but here is a recap (I’m sure there are things I missed):
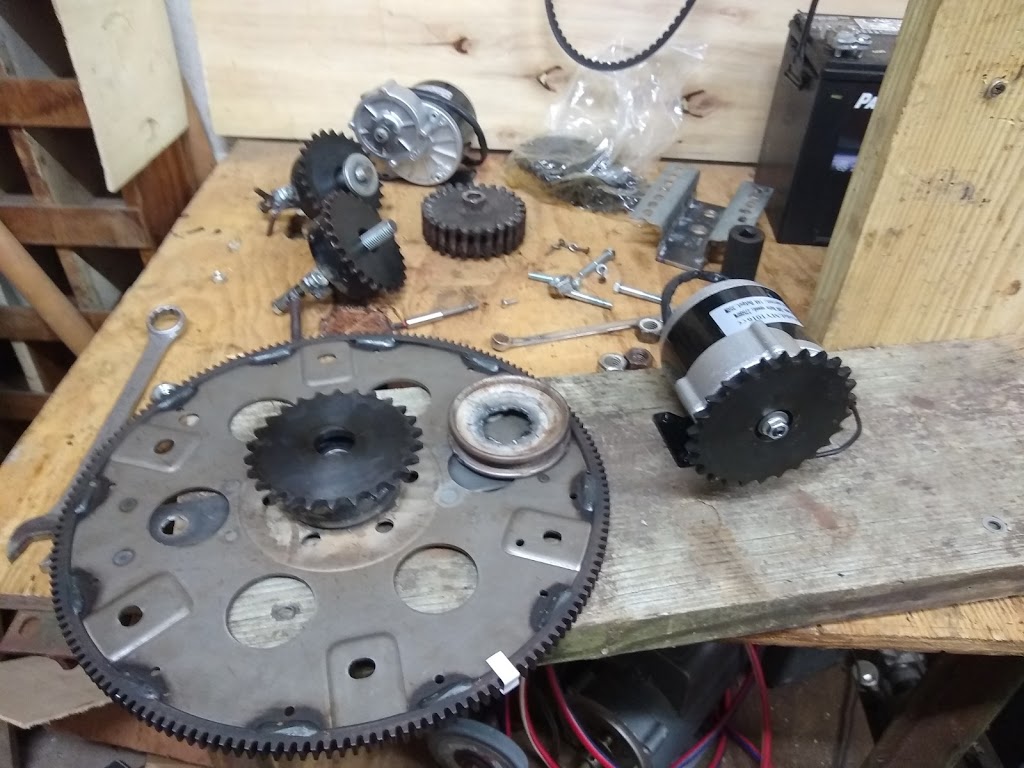
How to make steel spur gears, cheap enough to be disposable.
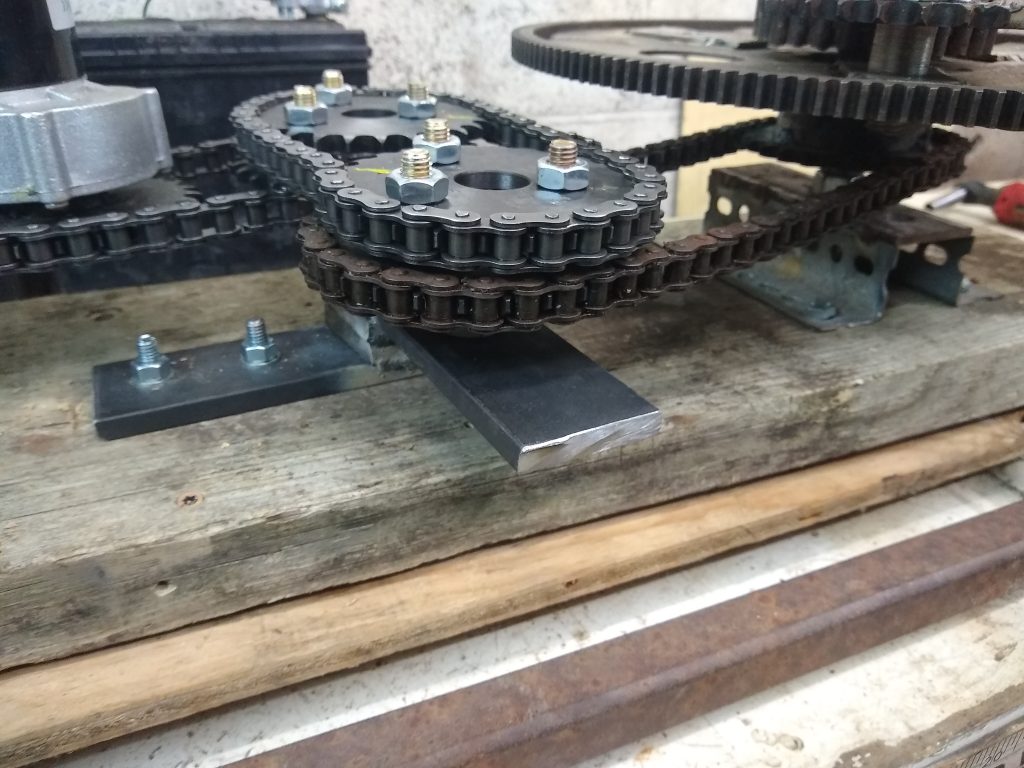
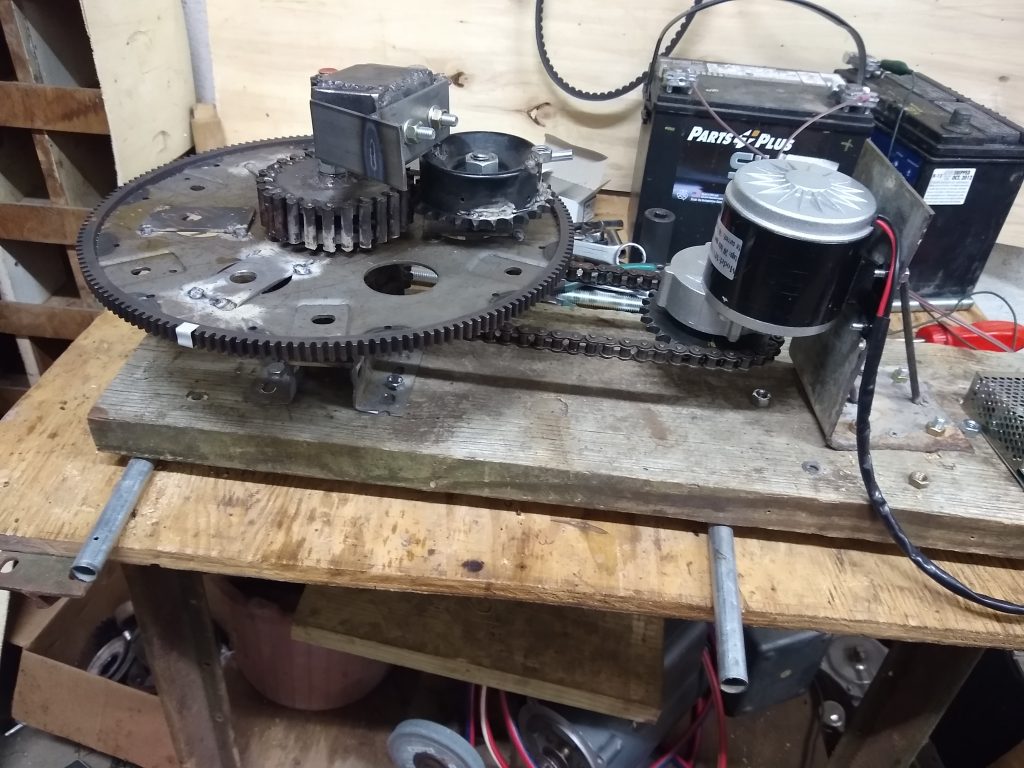
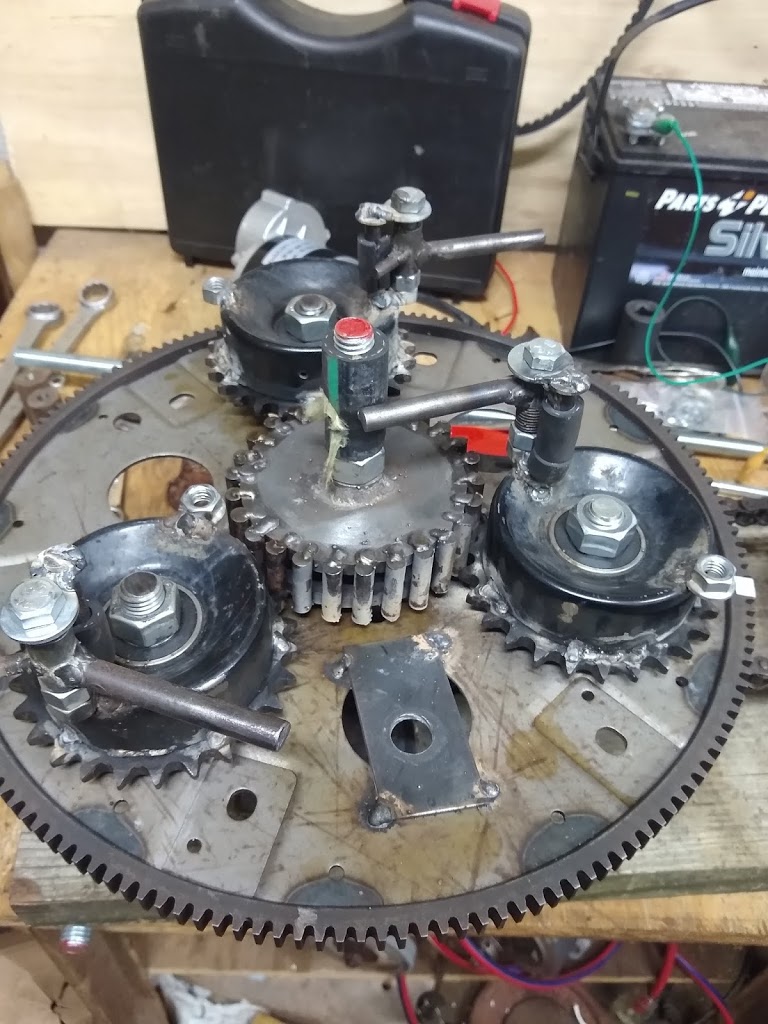
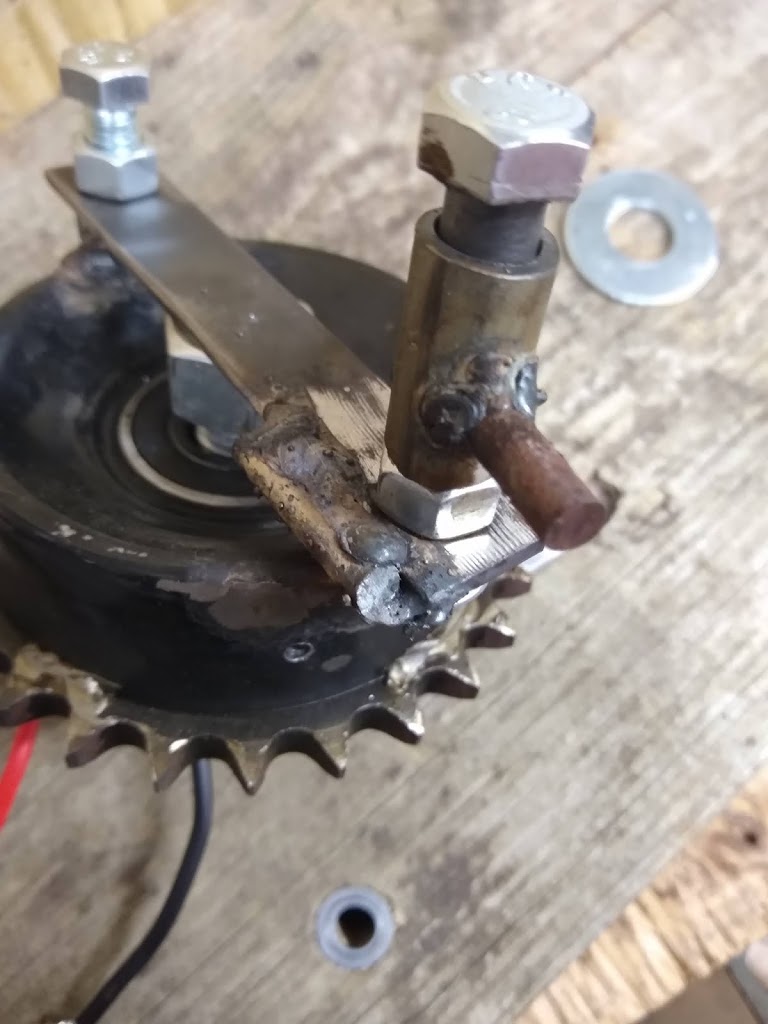
How to attach automotive flexplates to bearings for the main wheels.
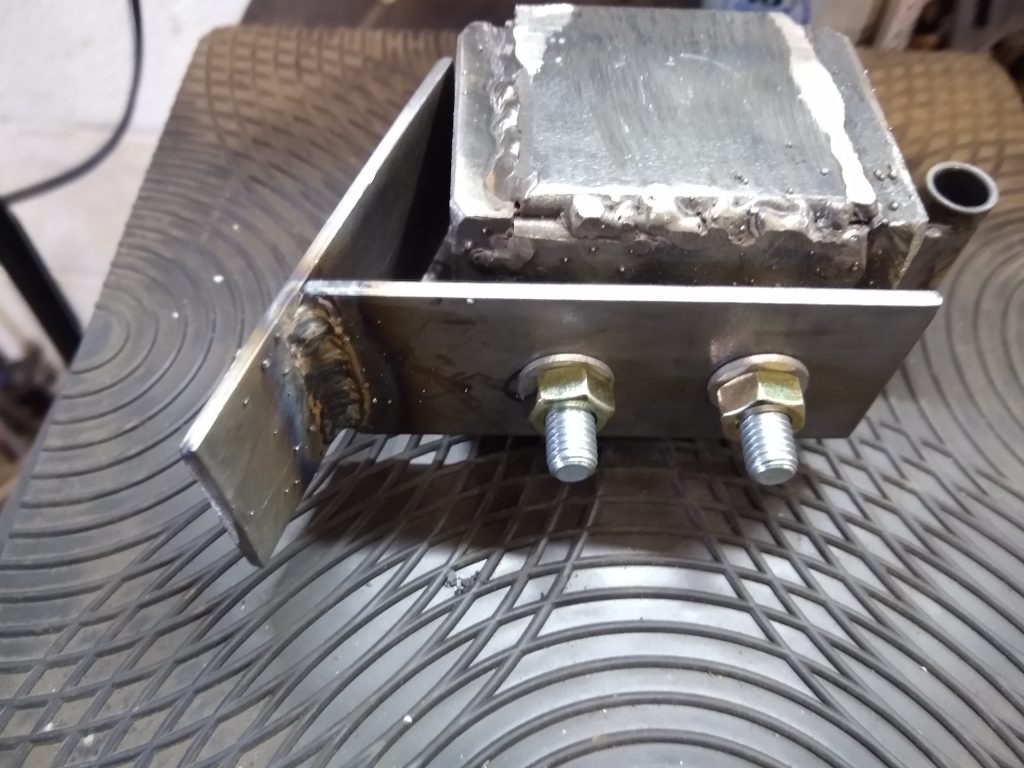
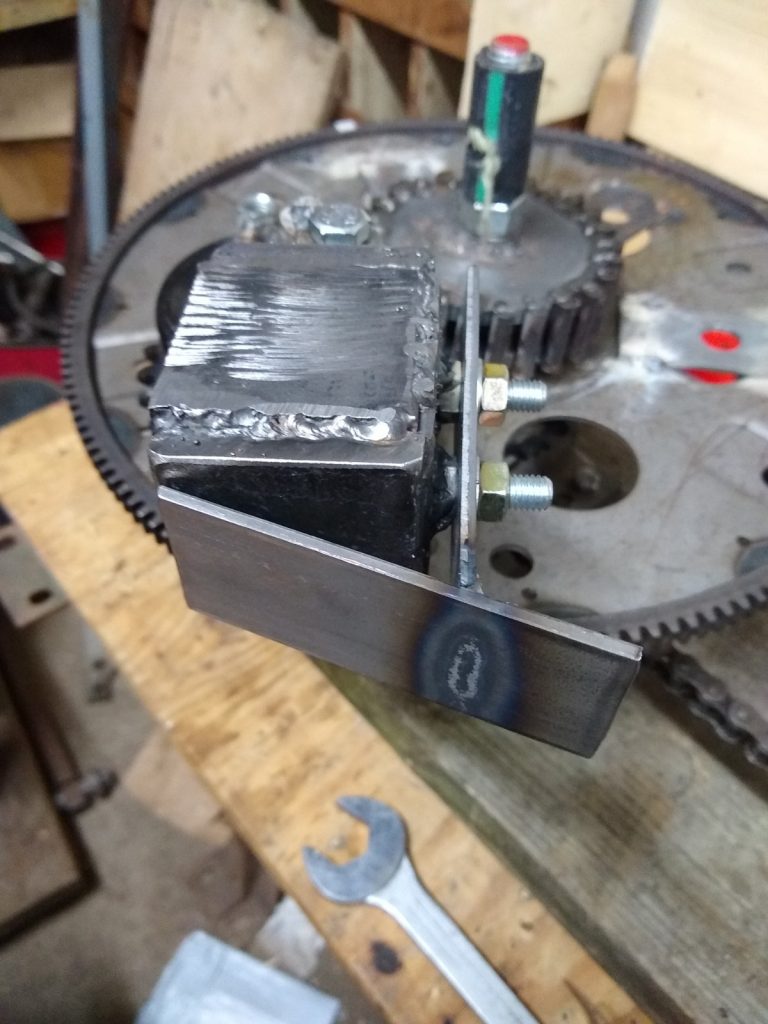
How to make different types of swinging weights.
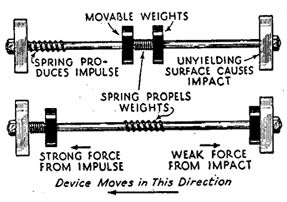
How important the inner stop is, it does not work without it!
How to make the outer stop a part of the planet gear.
How a slipping belt can cause it to stop thrusting (chains are better).
How different configurations of gears affect performance.
How different timing affects performance and is different for hybrid use.
How a dead blow weight design enhances performance.
How performance is affected by counter rotating wheels.
How to effectively use as a hybrid “helper” drive.
How to make better steel gears.
How to select the correct drive motor.
How to write a manual.
How to build a website.
How to ignore (and delete) negative comments.
How important it is to have friends who understand inertial propulsion (thanks Tokio).
How an eccentric gear design can enhance performance.
How important it is to listen to and commune with my God.
I also learned a whole lot about what does NOT work!!!
There are probably more items to add… Read the blog & watch the videos for details including some failed tests, early tests, designs that work, and designs that don’t.
I already have 2 design changes in mind for the first part of 2021, it should be exciting! I hope others get busy building too! I also hope everyone stays safe. Happy New Year!