Announcement:
Announcing “PIETECH Electric Propulsion”:
It has been a couple of weeks since my last post, but I do not want anyone to think I am not actively pursuing this quest for universal electric propulsion. The Grassroots Mechanic Movement continues the “Open Source” mission to see this technology advance and freely share information. The Grassroots Mechanic Movement is also in a well controlled growth period which will be branching out creating a somewhat separate entity which will be the “industrial development” branch known as “PIETECH Electric Propulsion” which still needs a logo.
Everything here on The Grassroots Mechanic Movement blog remains free and Open Source always, but PIETECH Electric Propulsion is going to allow the PIE technology to expand into the industrial mainstream as this still-infant technology grows and matures.
Current Work:
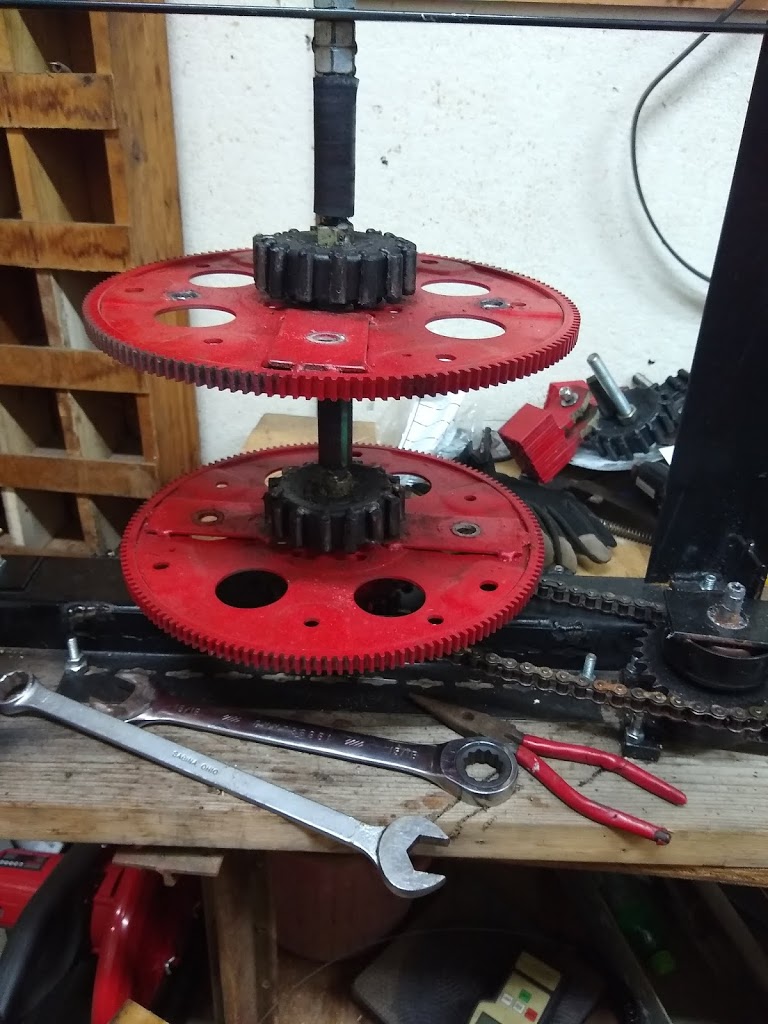
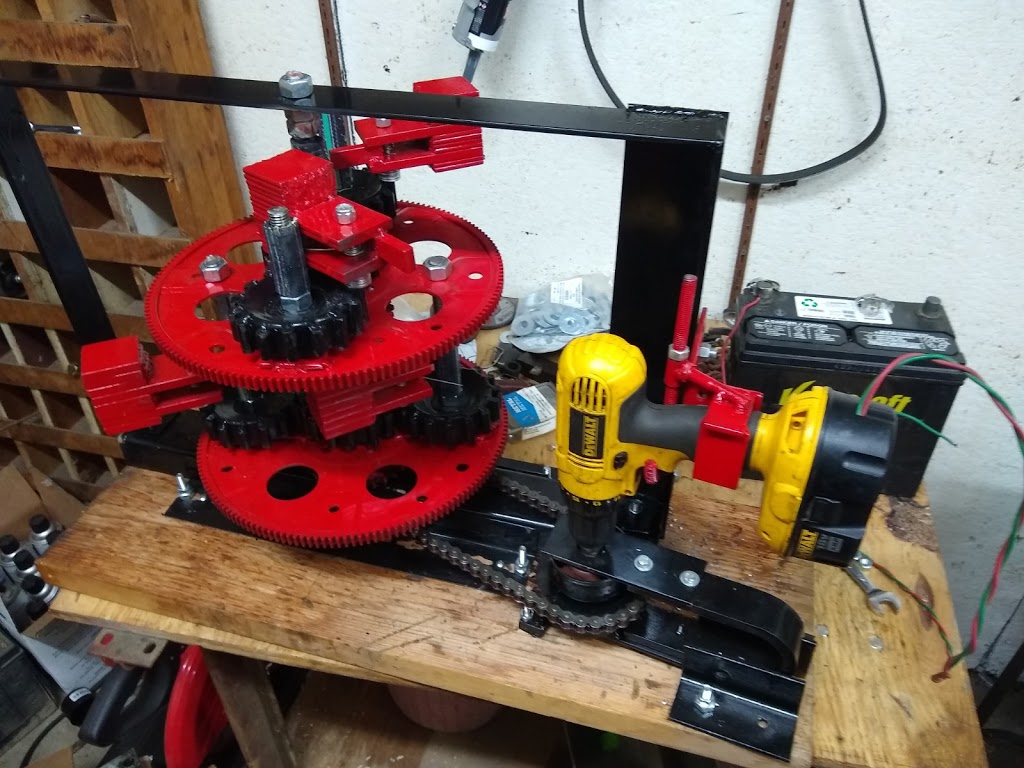
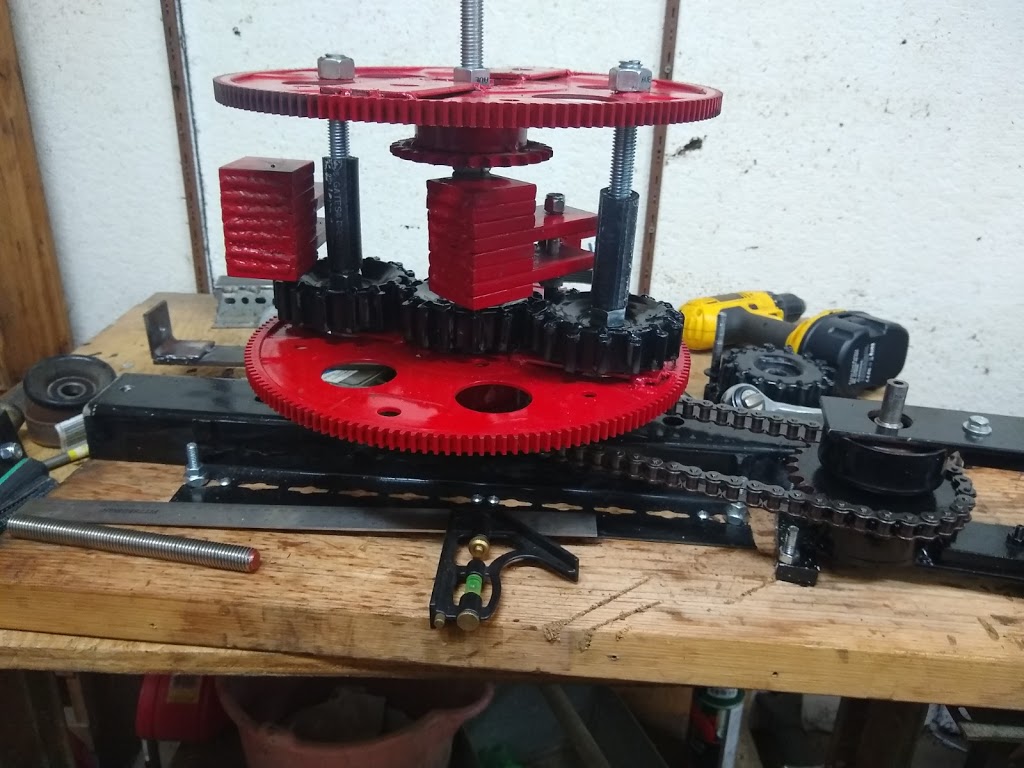
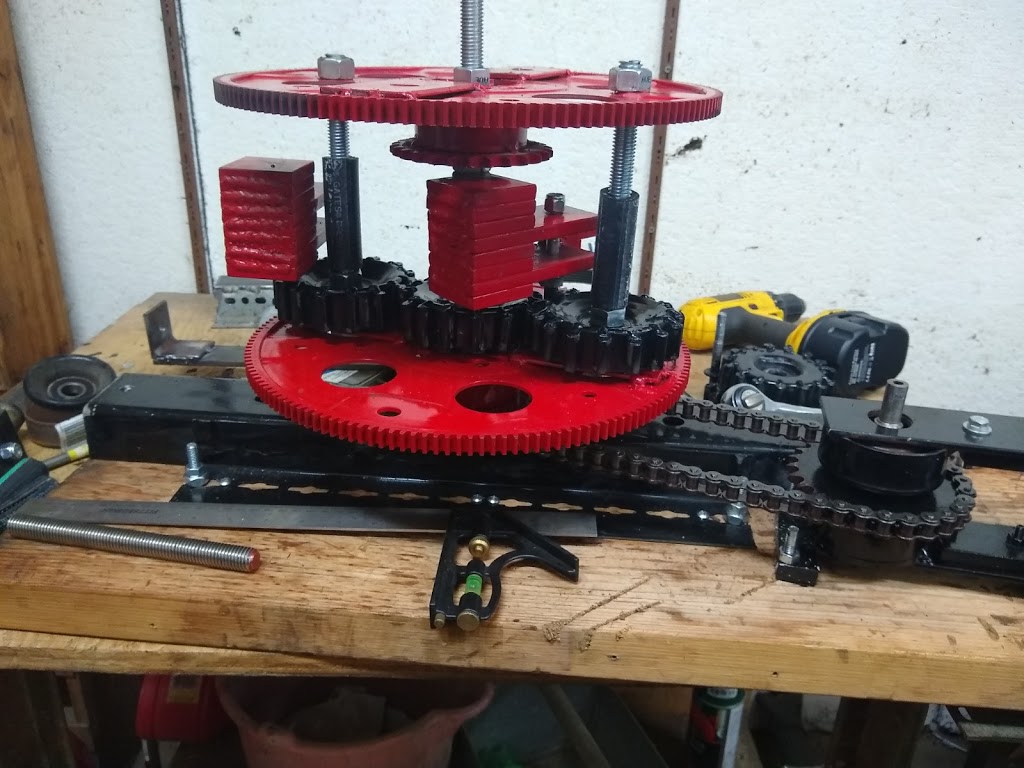
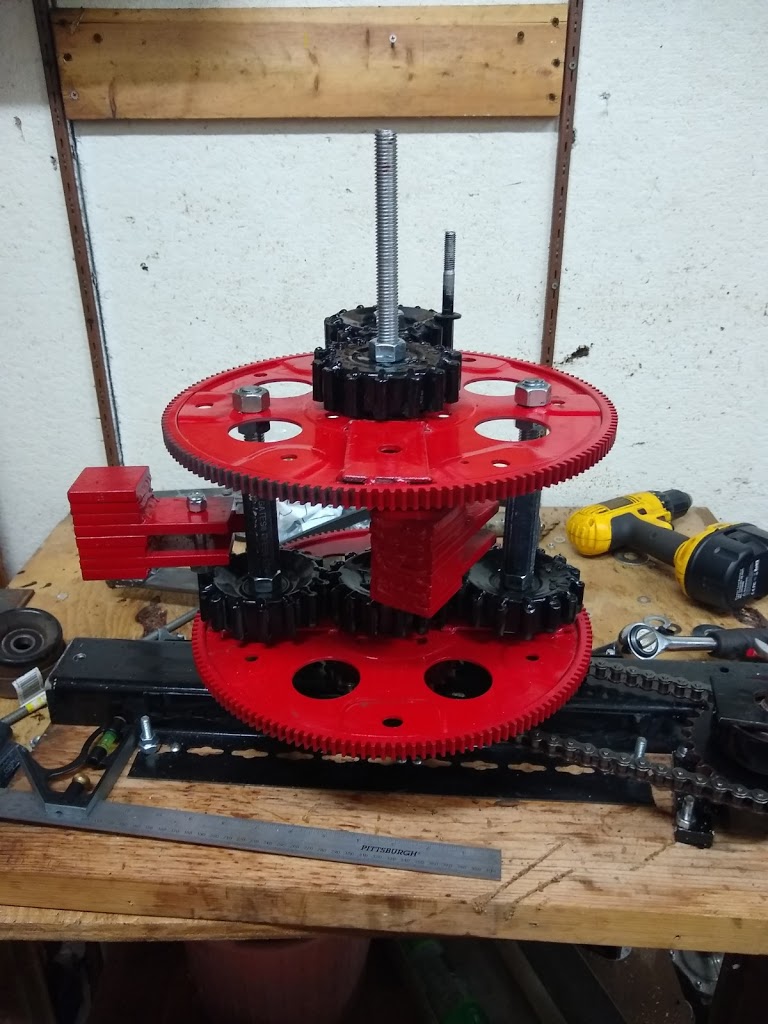
Currently I am continuing the R&D work necessary to advance the technology of the PIEs 1 & 2, and I am working towards a higher-speed PIE system that should be capable of continuous run speeds of 800 to 2000 RPMs.
I am also collaborating with other researchers around the world who are working toward a similar goal of cheap, clean, electric propulsion for vehicles of different types. This dynamic research is advancing well and will be announced when those independent researchers choose to allow the release of information (their work, their choice).
I am currently working on an instruction manual for those wanting to build a PIE 1.0 and/or 2.0. This will include specs, dimensions, building techniques, photos, reference materials, and hopefully links to videos. Although this tech is open source, I do believe that there are those who are very serious about building and would benefit from detailed instructions. Any proceeds from manual sales will directly help finance PIETECH research. I am hoping to have this material available by the end of 2020.
Review:
Let’s review where we stand in the “public” development of this technology. I say “public” because it has come to light that these types of tech have been used in satellites since sometime in the early 1960s, but it was just recently declassified… Maybe because of Space-X?
1- We have proven the theories of inertial propulsion are viable, as have others such as Steve Hampton and Mike Gamble neither of whom have I had any contact with at this time.
2- We have also proven the PIE design to be inexpensively reproducible.
3- We have obtained measurable results when used as an electric hybrid power source in a motor vehicle.
4- We have proven that there is no need for a counter-rotating assembly in the low-speed PIE drives.
5- We have proven that rotational speed and timing have a dramatic effect on the amount of thrust (maybe more important than the amount of weight?).
6- We have seen, measured, and proven the effects of both “time” and “timing” within the operation of the PIE. Time somewhat analogous with RPMs and timing is a given physical position within a time frame.
Current Developmental Position:
Now that we have “done it” by proving the concept beyond any doubt. It is time to design a way to put it to use. This means designing a smaller yet more powerful system that delivers clean, stable, and (hopefully) quiet thrust for common use in vehicles.
It has been publicly stated by experts (and I quote one of them) that this type of technology “…will never blast us into space…”, but the same PhD who publicly stated that would not acknowledge the potential usefulness as an electric drive for terrestrial vehicles (wheeled or otherwise). But the advances made in my lab (and others), working on a shoestring budget, and in less than a years’ time, seem to indicate the possible fallacy of that statement.
I BELIEVE that if we work together and collaborate as a community of people, each with his or her own individual skill sets, we can achieve great things!
Some will be mathematicians, while others have great mechanical prowess, and yet others may simply enjoy working on individual components of a larger system. PhD’s and dropouts, mechanics and accountants, pilots and hermits, all working together in harmony toward a greater goal. Impossible? Maybe. Worth trying? Definitely!
When I can foresee components from different systems being used in an assembly together, I feel that I am looking at the future for PIETECH, Dean Drives, Cooke Drives, Gyro Build and others!
Coming Next: The High Speed PIETECH system and Continuing PIE 2.0 Testing…